
En physique , l'accélération mesure la rapidité et la direction de la variation de la vitesse et de la direction du mouvement d'un objet. Elle est définie comme le taux de variation de la vitesse . À l'instar de la vitesse, l'accélération possède une magnitude et une direction , ce qui en fait une grandeur vectorielle . L' unité SI de l'accélération est le mètre par seconde au carré ( m⋅s⁻² , m /s² ) .
L' accélération tangentielle d'un objet est la composante de l' accélération qui s'exerce dans le même sens que son mouvement (ou vitesse tangentielle ). Lorsque la direction de la vitesse de l'objet reste constante, on parle d'accélération linéaire . La décélération, ou ralentissement , est la composante de l'accélération qui s'exerce dans le sens opposé (ou antiparallèle ) à la vitesse tangentielle. L'accélération radiale , ou accélération normale (ou accélération centripète lors d'un mouvement circulaire), est la composante de l'accélération qui modifie la direction de la vitesse de l'objet.
En mécanique newtonienne , l'accélération d'une masse résulte des forces qui s'exercent sur elle, son accélération résultante étant la somme des forces qui s'exercent sur elle. D'après la deuxième loi de Newton [ amplitude de l' accélération résultante est proportionnelle à l'amplitude de la force résultante agissant sur l'objet et inversement proportionnelle à sa masse, tandis que sa direction est la même que celle de la force résultante .
Définition et propriétés
Accélération moyenne

L'accélération moyenne d'un objet sur une période donnée est égale à sa variation de vitesse , v, divisée par la durée de la période, t. Mathématiquement, l'accélération moyenne est la méthode la plus simple pour mesurer l'accélération, ne nécessitant que la connaissance de la variation de vitesse et de la variation de temps. À proprement parler, l'accélération moyenne est la seule accélération réelle que l'on puisse mesurer directement sans faire appel à une loi empirique ; elle constitue donc la forme la plus fondamentale de mesure de l'accélération.
L'accélération moyenne est le plus souvent utilisée pour approximer la cinématique d'un objet en supposant que sa vitesse varie linéairement avec le temps. Sur de courts intervalles de temps, on peut souvent supposer que l'accélération est uniforme , c'est-à-dire que l'accélération de l'objet sera exactement égale à l'accélération moyenne (voir la sous-section « Accélération uniforme » pour plus de détails).
D'après la deuxième loi de Newton , l'accélération moyenne est liée à la force moyenne exercée sur une particule de masse par la relation suivante : Cela signifie que la mesure de l'accélération moyenne est également une mesure de la force moyenne (également appelée impulsion ).
Accélération instantanée
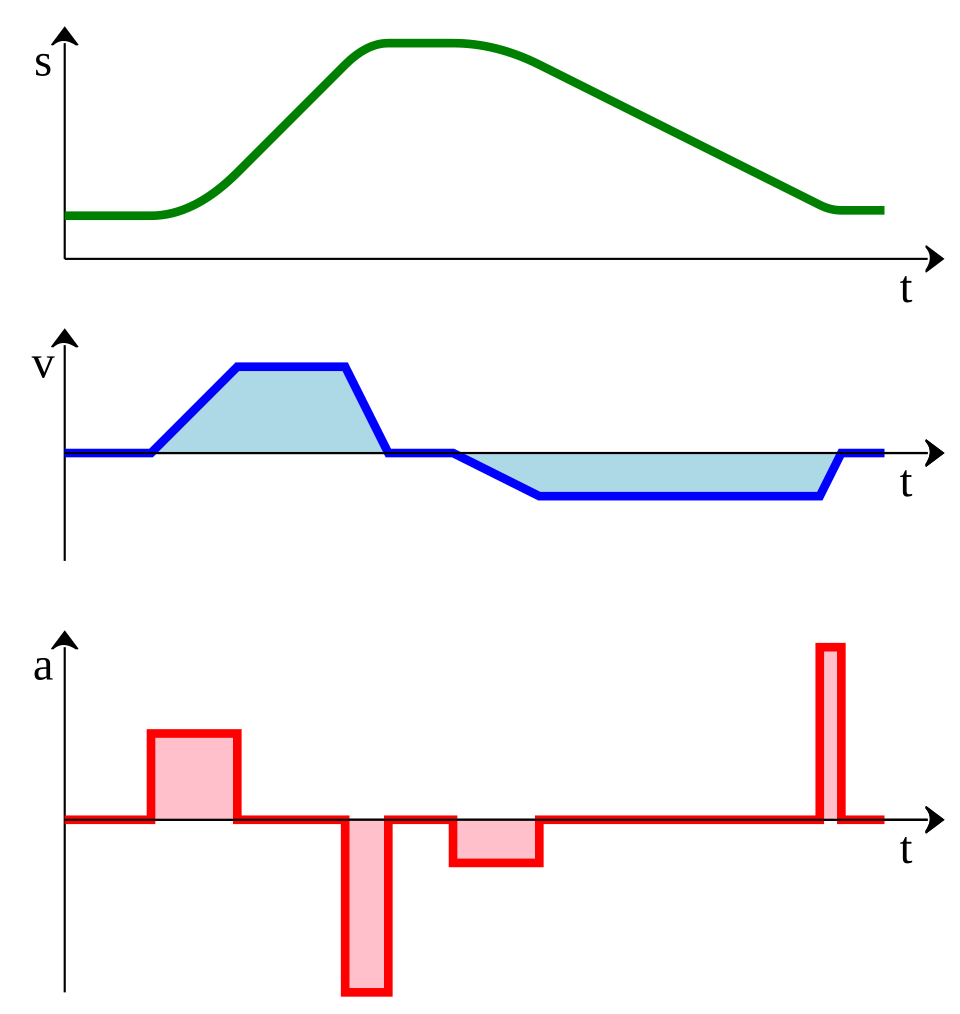
- une fonction d'accélération a ( t ) ;
- l'intégrale de l'accélération est la fonction de vitesse v ( t ) ;
- et l'intégrale de la vitesse est la fonction de distance s ( t ) .
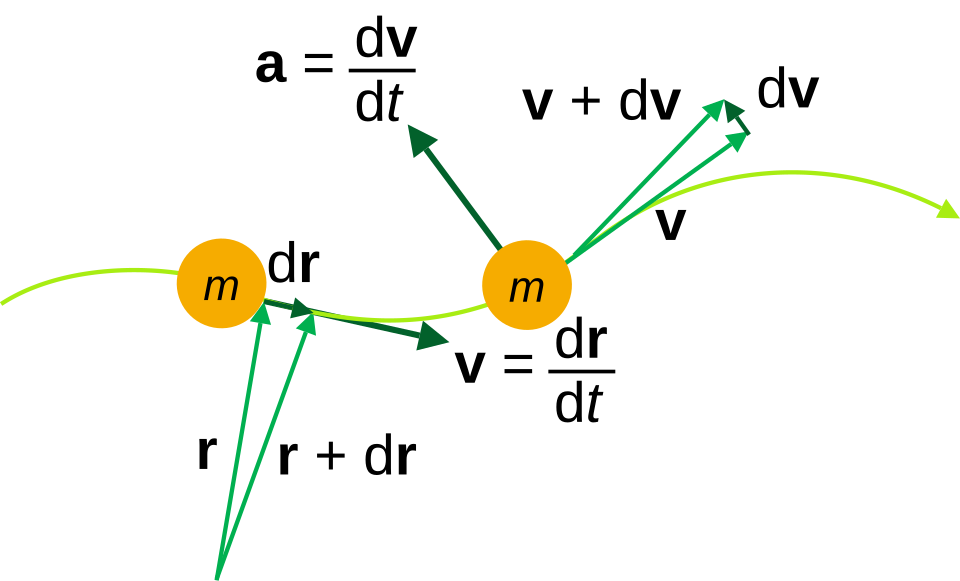
L'accélération instantanée est la limite de l'accélération moyenne sur un intervalle de temps infinitésimal . En termes de calcul différentiel , l'accélération instantanée est la dérivée du vecteur vitesse par rapport au temps : comme l'accélération est définie comme la dérivée de la vitesse v par rapport au temps t et que la vitesse est définie comme la dérivée de la position x par rapport au temps, l'accélération peut être vue comme la dérivée seconde de x par rapport à t : (Ici et ailleurs, si le mouvement est rectiligne , les grandeurs vectorielles peuvent être remplacées par des scalaires dans les équations.)
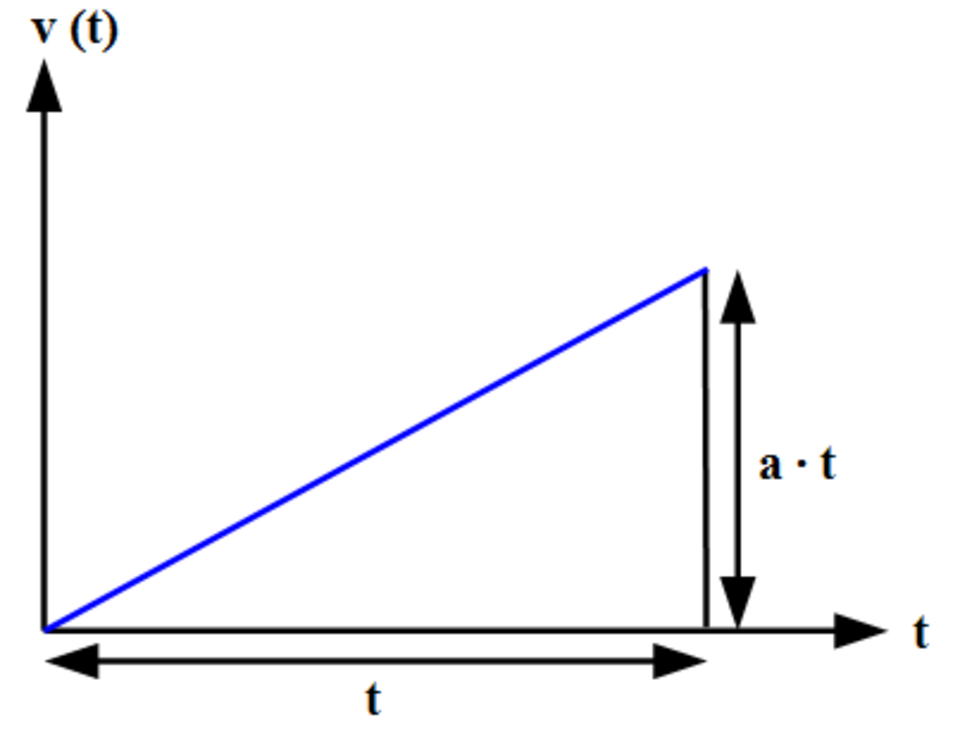
D'après le théorème fondamental du calcul , on peut voir que l' intégrale de la fonction d'accélération a ( t ) est la fonction de vitesse v ( t ) ; c'est-à-dire que l'aire sous la courbe d'un graphique d'accélération en fonction du temps ( a en fonction de t ) correspond à la variation de vitesse.
De même, l'intégrale de la fonction de secousse j ( t ) , la dérivée de la fonction d'accélération, peut être utilisée pour trouver la variation d'accélération à un certain instant :
Unités
L'accélération a les dimensions de la vitesse (L/T) divisée par le temps, c'est-à-dire L T −2 . L' unité SI de l'accélération est le mètre par seconde au carré (m s −2 ); ou « mètre par seconde par seconde », car la vitesse en mètres par seconde change de la valeur de l'accélération, chaque seconde.
Autres formes
Un objet en mouvement circulaire, comme un satellite en orbite autour de la Terre, subit une accélération due au changement de direction de son mouvement, même si sa vitesse reste constante. On dit alors qu'il subit une accélération centripète (dirigée vers le centre).

L'accélération propre , c'est-à-dire l'accélération d'un corps par rapport à la chute libre, est mesurée par un instrument appelé accéléromètre . La deuxième loi de Newton est généralement appliquée dans un référentiel inertiel. Dans un référentiel en accélération (unidimensionnelle), les lois de Newton restent applicables en introduisant une force d'inertie (force fictive) sur une masse , opposée à l'accélération du référentiel. Ceci explique la tendance de la masse à conserver son mouvement inertiel – à rester immobile ou à se déplacer à vitesse constante – tandis que le référentiel accélère. Par exemple, une personne dans un ascenseur ressent une sensation de poids différent selon que celui-ci accélère ou décélère. Si l'accélération propre est connue, sa mesure permet de la déduire ; c'est le principe d'un accéléromètre mécanique. En relativité générale, la gravité et l'accélération inertielle peuvent être localement indiscernables (voir Relativité générale ).
En mécanique classique , pour un corps de masse constante, l'accélération (vectorielle) de son centre de masse est proportionnelle au vecteur force résultante (c'est-à-dire la somme de toutes les forces) qui s'exercent sur lui ( deuxième loi de Newton ) : où F est la force résultante agissant sur le corps, m sa masse et a l'accélération de son centre de masse. Lorsque les vitesses approchent celle de la lumière , les effets relativistes deviennent de plus en plus importants.
Exemple
Lorsqu'un véhicule démarre à l' arrêt (vitesse nulle dans un référentiel inertiel ) et se déplace en ligne droite à des vitesses croissantes, il accélère dans le sens de son déplacement. Si le véhicule tourne, une accélération se produit dans la nouvelle direction, modifiant ainsi son vecteur mouvement. La composante de l'accélération du véhicule dans le sens de sa vitesse est appelée accélération linéaire ou tangentielle ; les passagers la perçoivent comme une force fictive les repoussant vers leur siège ou les en éloignant. Lors d'un changement de direction, la composante de l'accélération perpendiculaire à la vitesse est appelée accélération radiale ou normale (ou accélération centripète lors d'un mouvement circulaire) ; les passagers perçoivent la réaction à cette force comme une force centrifuge (également une force fictive). Si la vitesse du véhicule diminue, il s'agit d'une accélération dans la direction opposée au vecteur vitesse, parfois appelée décélération ou ralentissement ; les passagers perçoivent alors la réaction à la décélération comme une force d'inertie les poussant vers l'avant. Ce type de décélération est souvent obtenu par la combustion des rétrofusées dans les engins spatiaux . L’accélération et la décélération sont traitées de la même manière, car elles correspondent toutes deux à des variations de vitesse. Chacune de ces accélérations (tangentielle, radiale, décélération) est ressentie par les passagers jusqu’à ce que leur vitesse relative (différentielle) soit neutralisée par rapport à l’accélération due à la variation de vitesse.
Accélération tangentielle et centripète
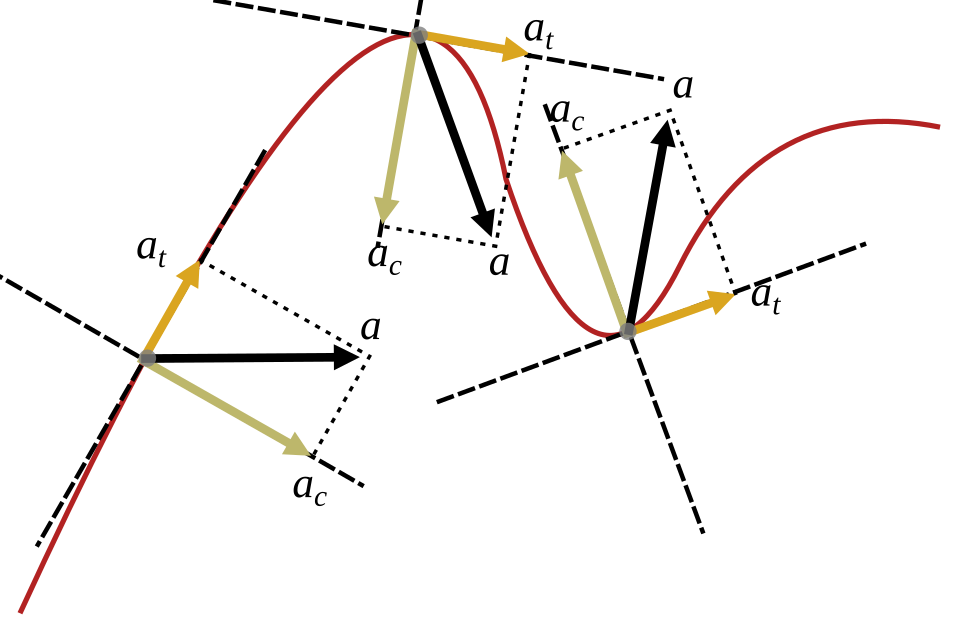
La vitesse d'une particule se déplaçant sur une trajectoire courbe en fonction du temps peut s'écrire : avec v la vitesse de déplacement le long de la trajectoire et u un vecteur unitaire tangent à la trajectoire, pointant dans la direction du mouvement à l'instant considéré. En tenant compte à la fois de la variation de la vitesse v et de la variation de direction de u( t) , l'accélération d'une particule se déplaçant sur une trajectoire courbe peut s'écrire, en utilisant la règle de la chaîne pour la dérivation du produit de deux fonctions du temps :
où u<sub> n</sub> est le vecteur normal unitaire (intérieur) à la trajectoire de la particule (également appelé vecteur normal principal ), et r est son rayon de courbure instantané basé sur le cercle osculateur à l'instant t . Les composantes sont appelées respectivement l'accélération tangentielle et l'accélération normale ou radiale (ou l'accélération centripète dans le mouvement circulaire, voir aussi mouvement circulaire et force centripète ).
L'analyse géométrique des courbes de l'espace tridimensionnel, qui explique la tangente, la normale (principale) et la binormale, est décrite par les formules de Frenet-Serret .
Cas particuliers
Accélération uniforme
L'accélération uniforme ou constante est un type de mouvement dans lequel la vitesse d'un objet change d'une valeur égale à chaque intervalle de temps égal.
Un exemple fréquemment cité d'accélération uniforme est celui d'un objet en chute libre dans un champ gravitationnel uniforme. L'accélération d'un corps en chute libre, en l'absence de résistance au mouvement, dépend uniquement de l' intensité du champ gravitationnel g (également appelée accélération due à la gravité ). D'après la deuxième loi de Newton, la force agissant sur un corps est donnée par :
En raison des propriétés analytiques simples du cas d'une accélération constante, il existe des formules simples reliant le déplacement , les vitesses initiale et dépendante du temps , et l'accélération au temps écoulé : où
En particulier, le mouvement peut être décomposé en deux composantes orthogonales : l’une à vitesse constante et l’autre régie par les équations précédentes. Comme l’a démontré Galilée , le résultat est un mouvement parabolique, qui décrit par exemple la trajectoire d’un projectile dans le vide près de la surface de la Terre.
mouvement circulaire



Lors d' un mouvement circulaire uniforme , c'est-à-dire un déplacement à vitesse constante sur une trajectoire circulaire, une particule subit une accélération due à la modification de la direction de son vecteur vitesse, tandis que sa norme reste constante. La dérivée de la position d'un point sur une courbe par rapport au temps, soit sa vitesse, est toujours parfaitement tangente à la courbe, et donc orthogonale au rayon en ce point. Puisque, lors d'un mouvement uniforme, la vitesse tangentielle ne varie pas, l'accélération est nécessairement radiale et dirigée vers le centre du cercle. Cette accélération modifie constamment la direction de la vitesse pour la rendre tangente au point voisin, ce qui entraîne une rotation du vecteur vitesse le long du cercle.
- Pour une vitesse donnée , l'amplitude de cette accélération d'origine géométrique (accélération centripète) est inversement proportionnelle au rayon du cercle et augmente avec le carré de cette vitesse :
- Pour une vitesse angulaire donnée , l'accélération centripète est directement proportionnelle au rayon . Ceci est dû à la dépendance de la vitesse par rapport au rayon .
En exprimant le vecteur d'accélération centripète en composantes polaires, où est un vecteur allant du centre du cercle à la particule et de magnitude égale à cette distance, et en considérant l'orientation de l'accélération vers le centre, on obtient : Comme d'habitude en rotation, la vitesse d'une particule peut être exprimée comme une vitesse angulaire par rapport à un point situé à la distance : Ainsi
Cette accélération et la masse de la particule déterminent la force centripète nécessaire , dirigée vers le centre du cercle, qui constitue la force résultante agissant sur cette particule pour la maintenir dans ce mouvement circulaire uniforme. La « force centrifuge », qui semble s'exercer vers l'extérieur sur le corps, est une force fictive ressentie dans le référentiel du corps en mouvement circulaire, due à sa quantité de mouvement linéaire , un vecteur tangent au cercle de mouvement.
Dans un mouvement circulaire non uniforme, c'est-à-dire lorsque la vitesse varie le long de la trajectoire courbe, l'accélération possède une composante non nulle tangentielle à la courbe et n'est pas limitée à la normale principale , dirigée vers le centre du cercle osculateur, qui détermine le rayon de l'accélération centripète. La composante tangentielle est donnée par l'accélération angulaire , c'est-à-dire le produit de la variation de la vitesse angulaire par le rayon .
Le signe de la composante tangentielle de l'accélération est déterminé par le signe de l' accélération angulaire ( ), et la tangente est toujours dirigée à angle droit par rapport au vecteur rayon.
Systèmes de coordonnées
Dans les systèmes de coordonnées cartésiennes multidimensionnels , l'accélération est décomposée en composantes correspondant à chaque axe du système. Dans un système bidimensionnel, avec un axe x et un axe y, les composantes d'accélération correspondantes sont définies comme suit Le vecteur d'accélération bidimensionnel est alors défini comme suit : . La norme de ce vecteur est calculée par la formule de la distance : . Dans les systèmes tridimensionnels, avec un axe z supplémentaire, la composante d'accélération correspondante est définie comme suit : . Le vecteur d'accélération tridimensionnel est défini comme suit : , sa norme étant déterminée par .
Relation à la relativité
Relativité restreinte
La théorie de la relativité restreinte décrit le comportement des objets se déplaçant les uns par rapport aux autres à des vitesses proches de celle de la lumière dans le vide. La mécanique newtonienne se révèle être une approximation de la réalité, valable avec une grande précision aux basses vitesses. Lorsque les vitesses considérées se rapprochent de celle de la lumière, l'accélération ne suit plus les équations classiques.
Lorsque les vitesses se rapprochent de celle de la lumière, l'accélération produite par une force donnée diminue, devenant infinitésimale à l'approche de la vitesse de la lumière ; un objet doté d'une masse peut s'approcher asymptotiquement de cette vitesse , mais ne l'atteindra jamais.
La relativité générale
À moins de connaître l’état de mouvement d’un objet, il est impossible de distinguer si une force observée est due à la gravité ou à l’accélération – la gravité et l’accélération inertielle ayant des effets identiques. Albert Einstein a appelé cela le principe d’équivalence et a affirmé que seuls les observateurs qui ne ressentent aucune force – y compris la force de gravité – sont justifiés de conclure qu’ils ne subissent pas d’accélération.
Conversions
| Valeur de base | ( Gal , ou cm/ s² ) | ( pi/s 2 ) | ( m/s 2 ) | ( gravité standard , g 0 ) |
|---|---|---|---|---|
| 1 gal, ou cm/s 2 | 1 | 0,032 8084 | 0,01 | 1,019 72 × 10 −3 |
| 1 pi/s 2 | 30,4800 | 1 | 0,304 800 | 0,031 0810 |
| 1 m/ s² | 100 | 1/0,3048 ≈3.280 84 | 1 | 0,101 972 |
| 1 g 0 | 980,665 | 32,1740 | 9,806 65 | 1 |