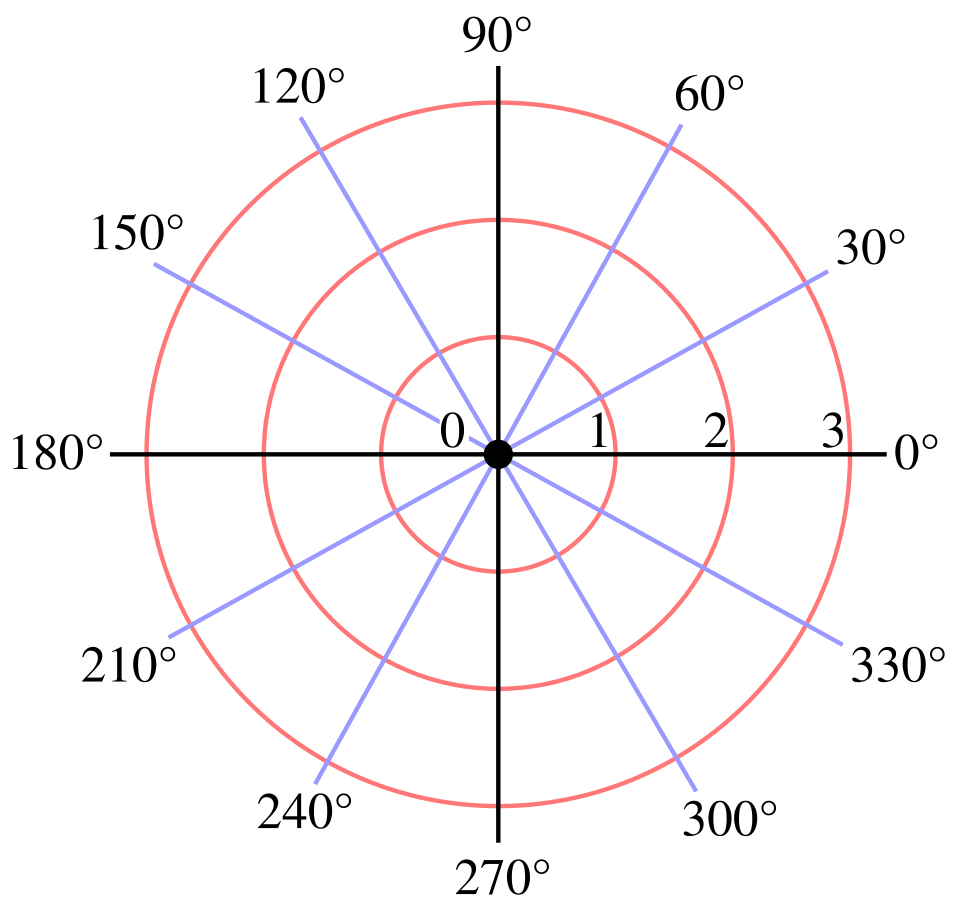
Points du système de coordonnées polaires de pôle O et d'axe polaire L. En vert, le point de coordonnée radiale 3 et de coordonnée angulaire 60 degrés (3 ; 60°). En bleu, le poi...
Worldlex WikiContenu en francaisLecture gratuite
Points du système de coordonnées polaires de pôle O et d'axe polaire L. En vert, le point de coordonnée radiale 3 et de coordonnée angulaire 60 degrés (3 ; mathématiques , le système de coordonnées polaires spécifie un point donné dans un plan en utilisant une distance et un angle comme ses deux coordonnées .
la distance du point par rapport à un point de référence appelé le pôle , et
la direction du point par rapport au pôle par rapport à la direction de l' axe polaire , un rayon tracé à partir du pôle.
La distance par rapport au pôle est appelée coordonnée radiale , distance radiale ou simplement rayon , et l'angle est appelé coordonnée angulaire , angle polaire ou azimut . Le pôle est analogue à l'origine dans un système de coordonnées cartésiennes .
Les coordonnées polaires sont particulièrement appropriées lorsque le phénomène étudié est intrinsèquement lié à une direction et à une distance par rapport à un point central dans un plan, comme c'est le cas pour les spirales . Les systèmes physiques plans, composés de corps en mouvement autour d'un point central, ou les phénomènes prenant naissance à partir d'un point central, sont souvent plus simples et plus intuitifs à modéliser à l'aide des coordonnées polaires.
Grégoire de Saint-Vincent et Bonaventura Cavalieri ont introduit indépendamment les concepts du système au milieu du XVIIe siècle, bien que le terme proprement dit de coordonnées polaires ait été attribué à Gregorio Fontana au XVIIIe siècle. La motivation initiale de l'introduction du système polaire était l'étude du mouvement circulaire et orbital .
Hipparque, astronome grec
Les concepts d'angle et de rayon étaient déjà utilisés par les peuples anciens du premier millénaire avant J.-C. L'astronome grec Hipparque (190-120 avant J.-C.) a établi un tableau des fonctions de corde , donnant la longueur de la corde pour chaque angle, et il existe des références à son utilisation des coordonnées polaires pour déterminer la position des étoiles. Dans son ouvrage « Sur les spirales » , le mathématicien grec Archimède décrit sa spirale , une fonction dont le rayon dépend de l'angle. Cependant, l'œuvre grecque ne s'étendait pas à un système de coordonnées complet.
À partir du VIIIe siècle, les astronomes ont mis au point des méthodes pour approximer et calculer la direction de La Mecque ( qibla ) — ainsi que sa distance — depuis n'importe quel point du globe terrestre. À partir du IXe siècle, ils ont utilisé la trigonométrie sphérique et les méthodes de projection cartographique pour déterminer ces grandeurs avec précision. Le calcul consiste essentiellement à convertir les coordonnées polaires équatoriales de La Mecque (c'est-à-dire sa longitude et sa latitude ) en ses coordonnées polaires (c'est-à-dire sa qibla et la distance) par rapport à un système dont le méridien de référence est le grand cercle passant par le point considéré et les pôles terrestres, et dont l'axe polaire est la droite passant par ce point et son antipode .
Il existe plusieurs récits de l'introduction des coordonnées polaires comme composante d'un système de coordonnées formel. L'histoire complète du sujet est décrite dans l'ouvrage du professeur Julian Lowell Coolidge, de Harvard, intitulé « Origin of Polar Coordinates ». Les mathématiciens jésuites Grégoire de Saint-Vincent et l'Italien Bonaventura Cavalieri ont introduit indépendamment ces concepts au milieu du XVIIe siècle. Saint-Vincent en a parlé à titre privé en 1625 et a publié son ouvrage en 1647, tandis que Cavalieri a publié le sien en 1635, une version corrigée paraissant en 1653. Cavalieri a utilisé pour la première fois les coordonnées polaires pour résoudre un problème relatif à l'aire d'une spirale d'Archimède . Le mathématicien français Blaise Pascal a ensuite utilisé les coordonnées polaires pour calculer la longueur des arcs paraboliques .
Dans son ouvrage « Méthode des fluxions » (écrit en 1671, publié en 1736), le mathématicien anglais Sir Isaac Newton examina les transformations entre les coordonnées polaires, qu'il nomma « Septième manière ; pour les spirales », et neuf autres systèmes de coordonnées. On lui attribue l'origine du système de coordonnées polaires sous sa forme analytique et celle des coordonnées bipolaires au sens strict. Dans la revue « Acta Eruditorum » (1691), le mathématicien suisse Jacob Bernoulli utilisa un système comportant un point sur une droite, appelé respectivement pôle et axe polaire . Les coordonnées étaient définies par la distance au pôle et l'angle par rapport à l' axe polaire . Les travaux de Bernoulli s'étendirent au calcul du rayon de courbure des courbes exprimées dans ces coordonnées.
Le terme « coordonnées polaires » a été attribué à Gregorio Fontana et utilisé par les auteurs italiens du XVIIIe siècle. Il apparaît en anglais dans la traduction de George Peacock , en 1816, du *Differential and Integral Calculus* de Lacroix . Alexis Clairaut fut le premier à envisager les coordonnées polaires en trois dimensions, et Leonhard Euler le premier à les développer concrètement.
Conventions
Une grille polaire comportant plusieurs angles, croissant dans le sens antihoraire et gradués en degrés.
La coordonnée radiale est souvent notée ρ . La coordonnée angulaire est notée φ , spécifiée par la norme ISO 31-11 (maintenant 80000-2:2019 ) , ou θ dans la littérature mathématique .
L'angle polaire est défini comme partant de 0° par rapport à une direction de référence et augmentant pour les rotations dans le sens horaire (↻) ou antihoraire (↺). Par exemple, en mathématiques, la direction de référence est généralement représentée par un rayon horizontal partant du pôle et se dirigeant vers la droite, et l'angle polaire devient positif pour les rotations antihoraires. En navigation ( relèvement , cap ), le cap de 0° est représenté verticalement vers le haut et l'angle augmente pour les rotations horaires. Les angles polaires diminuent et deviennent négatifs pour les rotations dans le sens opposé.
Unicité des coordonnées polaires
Ajouter un nombre quelconque de tours complets (360°) à la coordonnée angulaire ne modifie pas la direction correspondante. De même, toute coordonnée polaire est identique à la coordonnée munie de sa composante radiale négative et de sa direction opposée (en ajoutant 180° à l'angle polaire). Par conséquent, un même point peut être exprimé par une infinité de coordonnées polaires différentes , où n est un entier quelconque . De plus, le pôle lui-même peut être exprimé comme pour tout angle θ .
Lorsqu'une représentation unique est nécessaire pour tout point autre que le pôle, on se limite généralement aux nombres positifs ( ) et à l' intervalle ou à l'intervalle , qui en radians sont ou . Une autre convention, en référence au codomaine usuel de la fonction arctangente , consiste à autoriser des valeurs réelles non nulles arbitraires de la composante radiale et à restreindre l'angle polaire à . Dans tous les cas, un azimut unique pour le pôle doit être choisi, par exemple . 0 " 0
Conversion entre coordonnées polaires et cartésiennes
Un diagramme illustrant la relation entre les coordonnées polaires et cartésiennes.
Les coordonnées cartésiennes et peuvent être converties en coordonnées polaires et , avec et dans l'intervalle par : où atan2 est une variante courante de la fonction arctangente définie comme 0\\\\ \\arctan\\left(\\frac{y}{x}\ ight) + \\pi & \\mbox{if } x < 0 \\mbox{ and } y \\ge 0\\\\ \\arctan\\left(\\frac{y}{x}\ ight) - \\pi & \\mbox{if } x < 0 \\mbox{ and } y < 0\\\\ \\frac{\\pi}{2} & \\mbox{if } x = 0 \\mbox{ and } y > 0\\\\ -\\frac{\\pi}{2} & \\mbox{if } x = 0 \\mbox{ and } y < 0\\\\ \ ext{undefined} & \\mbox{if } x = 0 \\mbox{ and } y = 0. \\end{cases}" 0\\\arctan \left({\frac {y}{x}} ight)+\pi &{\mbox{si }}x<0{\mbox{ et }}y\geq 0\\\arctan \left({\frac {y}{x}} ight)-\pi &{\mbox{si }}x<0{\mbox{ et }}y<0\\{\frac {\pi }{2}}&{\mbox{si }}x=0{\mbox{ et }}y>0\\-{\frac {\pi }{2}}&{\mbox{si }}x=0{\mbox{ et }}y>0\\-{\frac {\pi }{2}}&{\mbox{si }}x=0{\mbox{ et }}y>0}\\-{\frac {\pi }{2}}&{\mbox{si }}x=0} ...\| }}y<0\\{ ext{indéfini}}&{\mbox{si }}x=0{\mbox{ et }}y=0.\end{cases
Si r est calculé en premier comme ci-dessus, alors cette formule pour φ peut être énoncée plus simplement en utilisant la fonction arccosinus :
nombres complexes
Illustration d'un nombre complexe z représenté sur le plan complexe.
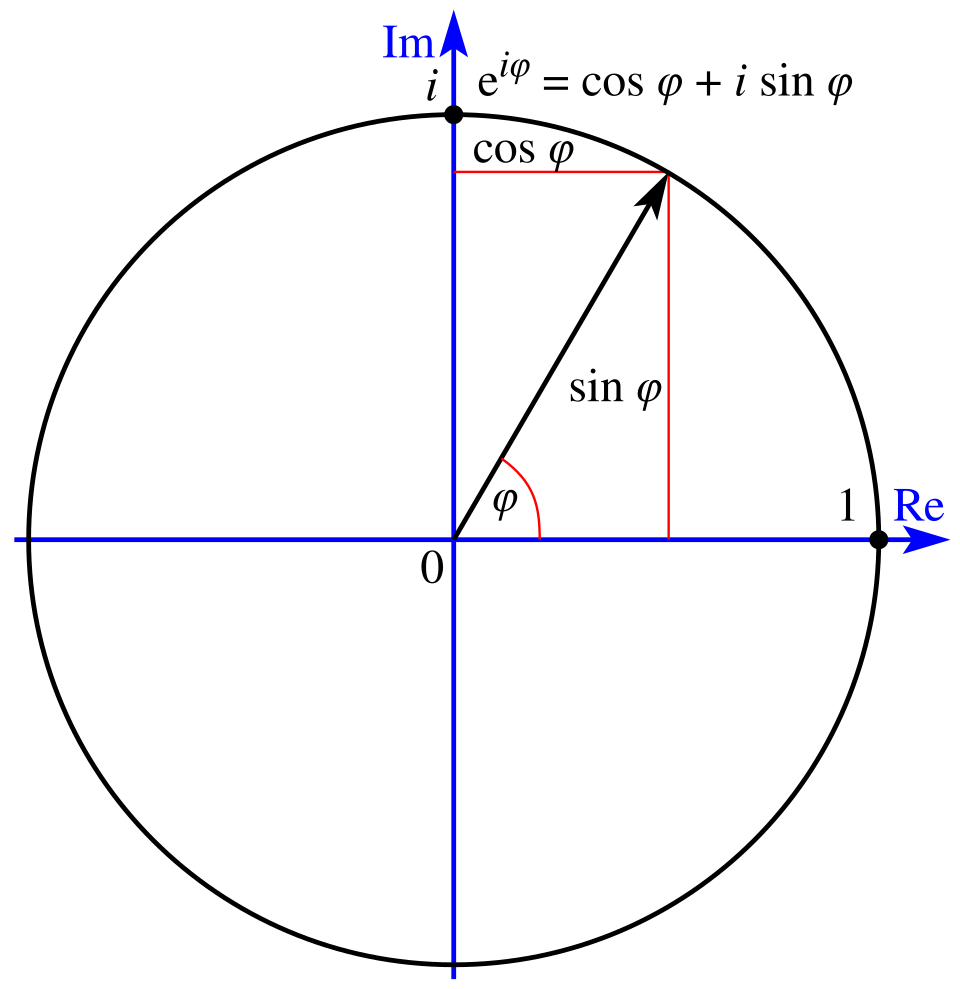
Illustration d'un nombre complexe représenté sur le plan complexe à l'aide de la formule d'Euler
Un nombre complexe est composé de nombres réels et , ainsi que d'un nombre imaginaire , qui peut s'écrire . Chaque nombre complexe représente un point du plan complexe , et peut donc être exprimé en spécifiant soit les coordonnées cartésiennes du point (appelées forme rectangulaire ou cartésienne), soit les coordonnées polaires du point (appelées forme polaire).
Pour les opérations de multiplication , de division , d'exponentiation et d'extraction de racines des nombres complexes, il est généralement beaucoup plus simple de travailler avec des nombres complexes exprimés sous forme polaire plutôt que sous forme rectangulaire. D'après les lois de l'exponentiation :
Une courbe du plan cartésien peut être convertie en coordonnées polaires. Dans cette animation, elle est convertie en coordonnées polaires . Cliquez sur l'image pour plus de détails.
L'équation définissant une courbe plane exprimée en coordonnées polaires est appelée équation polaire . Dans de nombreux cas, une telle équation peut être simplement définie en exprimant r comme une fonction de φ . La courbe résultante est alors constituée de points de la forme ( r ( φ ), φ ) et peut être considérée comme le graphe de la fonction polaire r . Il est à noter que, contrairement aux coordonnées cartésiennes, la variable indépendante φ est le second élément du couple (r(φ ), φ) .
Différentes formes de symétrie peuvent être déduites de l'équation d'une fonction polaire r :
Si symétrique par rotation de α dans le sens horaire et antihoraire autour du pôle.
Du fait de la nature circulaire du système de coordonnées polaires, de nombreuses courbes peuvent être décrites par une équation polaire relativement simple, alors que leur forme cartésienne est beaucoup plus complexe. Parmi les plus connues de ces courbes figurent la rose polaire , la spirale d'Archimède , la lemniscate , la limaçon et la cardioïde .
Pour le cercle, la ligne et la rose polaire ci-dessous, il est entendu qu'il n'y a aucune restriction sur le domaine et l'image de la courbe.
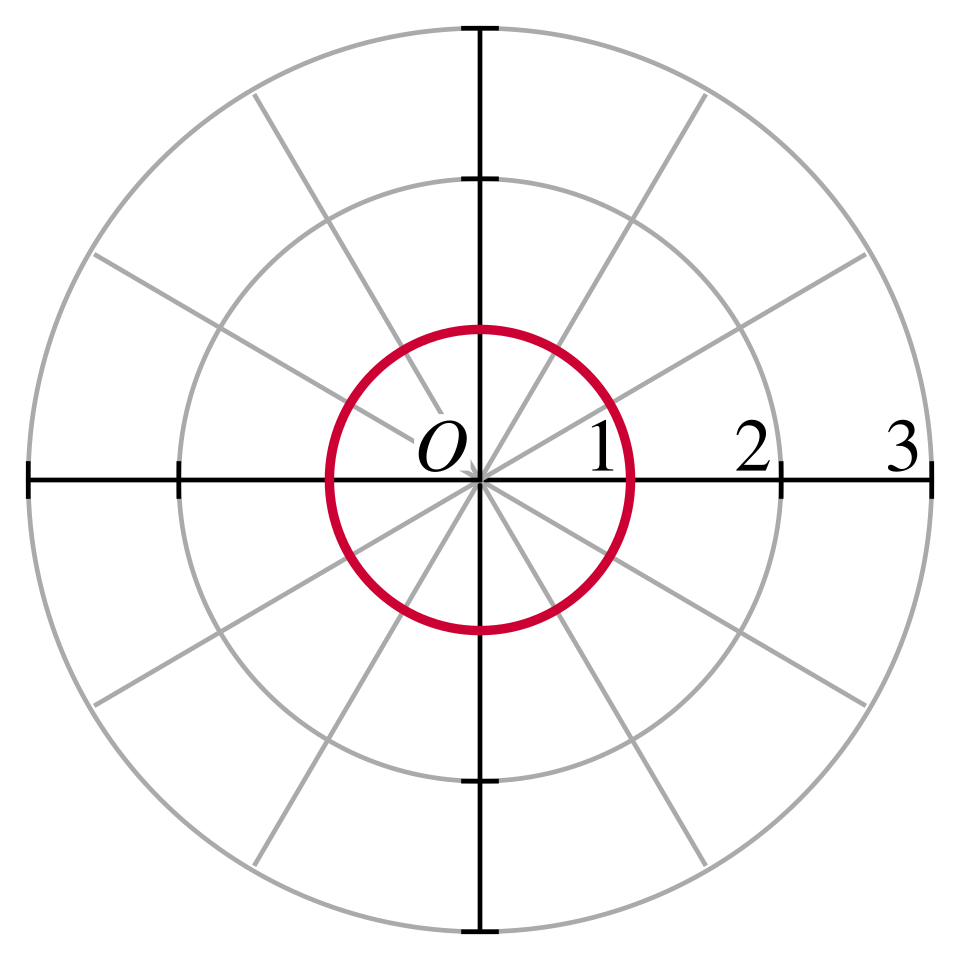
Cercle
Un cercle d'équation
Cela peut être simplifié de diverses manières, pour correspondre à des cas plus spécifiques, comme l'équation d'un cercle avec un centre au pôle et un rayon a .
Lorsque
Dans le cas général, l'équation peut être résolue pour
Sections coniques
Ellipse, montrant le rectum semi-latus
Une conique dont un foyer est situé au pôle et l'autre sur le rayon d'origine (de sorte que son grand axe coïncide avec l'axe polaire) est définie par : où est l' excentricité et le demi-latus rectum (la distance perpendiculaire, en un foyer, entre le grand axe et la courbe). Si , cette équation définit une hyperbole ; si , elle définit une parabole ; et si , elle définit une ellipse . Le cas particulier de cette dernière ellipse correspond à un cercle de rayon . 1 " 1
pente de la droite dans le système de coordonnées cartésiennes. La droite non radiale qui coupe perpendiculairement la droite radiale au point θ a pour équation
Autrement dit, il s'agit du point où la tangente coupe le cercle imaginaire de rayon
Rose polaire
Une rose polaire d'équation rose polaire est une courbe mathématique qui ressemble à une fleur à pétales et qui peut être exprimée par l'une des deux équations polaires distinctes suivantes : Les formes cosinus et sinus ne sont pas équivalentes, mais la différence réside uniquement dans la rotation de la courbe résultante. Toutes deux sont des cas particuliers de phase et, de manière équivalente, la rotation. Si impair , ou une rose à 2k pétales si variable fréquence spatiale .
Un bras d'une spirale d'Archimède d'équation spirale d'Archimède , découverte par Archimède , peut être décrite par une simple équation polaire. Elle est représentée par l'équation suivante : [équation manquante]. La variation du paramètre a modifie l'orientation de la spirale, tandis que b contrôle la distance entre les branches, qui est toujours constante pour une spirale donnée. La spirale d'Archimède possède deux branches, l'une pour 0"}},"i":0}}] φ 0"}},"i":0}}] > 0 et l'autre pour coniques , à avoir été décrites dans un traité mathématique, et constitue un excellent exemple de courbe définie de manière optimale par une équation polaire. 0"}},"i":0}}]
Une quadratrice du premier quadrant est une courbe dont la fraction du quart de cercle de rayon est déterminée par le rayon passant par le point d'intersection avec la courbe. Puisque cette fraction est : , la courbe est donnée par
Intersection de deux courbes polaires
Les graphiques de deux fonctions polaires et ont des intersections possibles de trois types :
À l'origine, si les équations et ont chacune au moins une solution.
Tous les points où sont des solutions de l'équation où est un entier.
Tous les points où sont des solutions de l'équation où est un entier.
Le calcul différentiel et intégral peut être appliqué aux équations exprimées en coordonnées polaires.
La coordonnée angulaire φ est exprimée en radians dans toute cette section, ce qui est le choix conventionnel en calcul différentiel et intégral.
Calcul différentiel
En utilisant dérivées totales ) ou
Nous avons donc la formule suivante :
En utilisant la transformation de coordonnées inverses, une relation de réciprocité analogue peut être établie entre les dérivées. Étant donné une fonction u ( r , φ ), il s'ensuit que ou
Nous avons donc les formules suivantes :
Pour trouver la pente cartésienne de la tangente à une courbe polaire r ( φ ) en un point donné, la courbe est d'abord exprimée comme un système d' équations paramétriques .
En divisant la deuxième équation par la première, on obtient la pente cartésienne de la tangente à la courbe au point :
Pour d'autres formules utiles, notamment la divergence, le gradient et le laplacien en coordonnées polaires, voir les coordonnées curvilignes .
Calcul intégral
longueur d'arc
La longueur d'arc (longueur d'un segment de droite) définie par une fonction polaire s'obtient par intégration sur la courbe r ( φ ). Soit L cette longueur le long de la courbe, du point A au point B , où ces points correspondent à φ = a et φ = b tels que
Zone
La région d'intégration R est délimitée par la courbe r ( φ ) et les rayons φ = a et φ = b .
Soit R la région délimitée par la courbe r ( φ ) et les rayons φ = a et φ = b , où
La région R est approximée par n secteurs (ici, n = 5).
Ce résultat s'obtient comme suit. Premièrement, l'intervalle secteur centré sur le pôle, de rayon r ( φ <sub>i</sub> ), d'angle au centre Δφ et de longueur d'arc r ( φ <sub>i</sub> )Δφ . L'aire de chaque secteur ainsi construit est donc égale à Δφ . Par conséquent , l'aire totale de tous les secteurs est Δφ = Δφ<sub>i</sub> × Δφ<sub>i </sub> .
Lorsque le nombre de sous-intervalles n augmente, l'approximation de l'aire s'améliore. En faisant tendre somme de Riemann de l'intégrale ci-dessus.
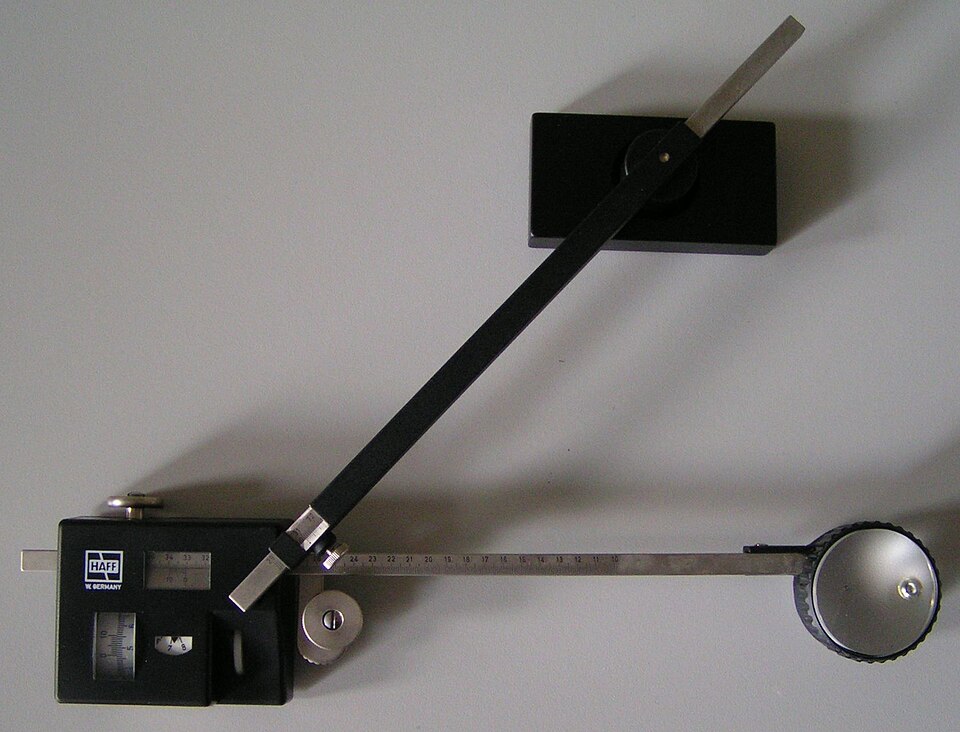
Un planimètre , qui calcule mécaniquement les intégrales polaires
Le planimètre est un appareil mécanique qui calcule les intégrales d'aire . Il mesure l'aire des figures planes en les traçant : cela reproduit l'intégration en coordonnées polaires en ajoutant une articulation de sorte que le mécanisme à 2 éléments applique le théorème de Green , convertissant l'intégrale polaire quadratique en une intégrale linéaire.
Par conséquent, un élément de surface en coordonnées polaires peut s'écrire comme
Une fonction donnée en coordonnées polaires peut être intégrée comme suit :
Ici, R désigne la même région que précédemment, à savoir la région délimitée par la courbe r ( φ ) et les rayons φ = a et φ = b . La formule de l'aire de R est obtenue en prenant f égal à 1.
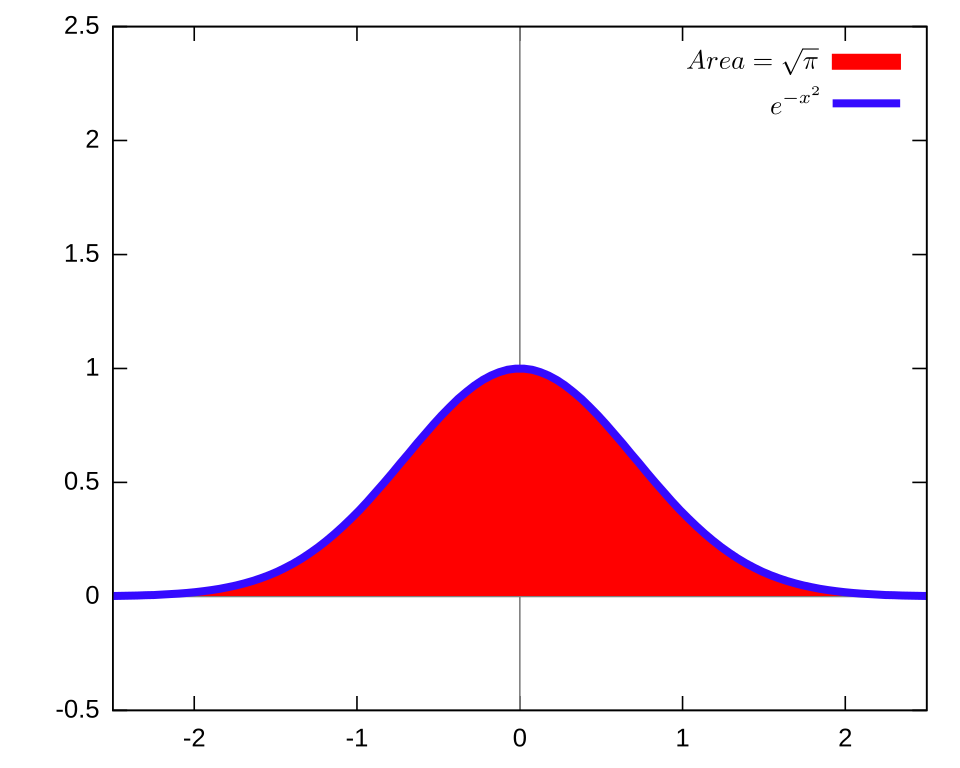
Un graphique de et de l'aire entre la fonction et l' axe des -axe, qui est égale à .
Le calcul vectoriel peut également être appliqué aux coordonnées polaires. Pour un mouvement planaire, soit le vecteur de position base orthonormée à trois vecteurs unitaires : les directions radiale, transversale et normale . La direction radiale est définie par normalisation : la direction normale est notée : La direction transversale est perpendiculaire à la fois aux directions radiale et normale :
La position et la vitesse peuvent alors s'exprimer comme suit, la vitesse angulaire étant nécessairement exprimée en radians par seconde (ou en multiples de celle-ci), et
Pour une courbe en 2D où le paramètre est les équations précédentes se simplifient en :
Termes centrifuges et de Coriolis
deuxième loi de Newton dans un référentiel en rotation. Dans ce contexte, ces termes supplémentaires sont souvent appelés forces fictives ; fictifs car ils résultent simplement d'un changement de référentiel. Cela ne signifie pas qu'ils n'existent pas ; ils n'existent que dans le référentiel en rotation.
Le vecteur de position r pointe toujours radialement à partir de l'origine.
Vecteur vitesse v , toujours tangent à la trajectoire du mouvement.
Le vecteur d'accélération a n'est pas parallèle au mouvement radial mais décalé par les accélérations angulaires et de Coriolis, ni tangent à la trajectoire mais décalé par les accélérations centripètes et radiales.
Vecteurs cinématiques en coordonnées polaires planes. Notez que ce cadre n'est pas limité à un espace bidimensionnel, mais s'applique à un plan dans toute dimension supérieure.
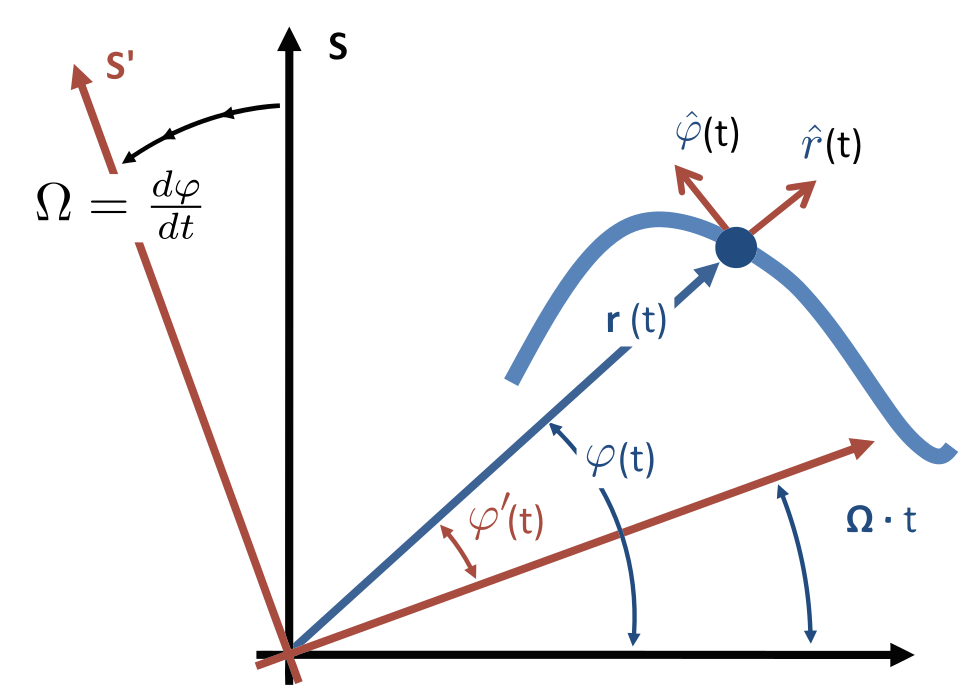
Le référentiel inertiel S et le référentiel corotatif instantané non inertiel S′ sont définis . Le référentiel corotatif tourne à la vitesse angulaire Ω, égale à la vitesse de rotation de la particule autour de l'origine de S′ à l'instant t . La particule est située à la position vectorielle r ( t ) et les vecteurs unitaires sont représentés dans la direction radiale par rapport à l'origine, ainsi que dans la direction d'angle ϕ croissant normal à la direction radiale. Ces vecteurs unitaires ne sont pas nécessairement liés à la tangente et à la normale à la trajectoire. De même, la distance radiale r n'est pas nécessairement liée au rayon de courbure de la trajectoire.
Soit ( r ( t ), φ ( t )) la position de la particule dans le référentiel inertiel, et ( r ′ (t), φ ′ (t)) sa position dans le référentiel corotatif . Puisque le référentiel corotatif tourne à la même vitesse que la particule, dφ ′/ dt = 0. La force centrifuge fictive dans le référentiel corotatif est mrΩ² , dirigée radialement vers l'extérieur. La vitesse de la particule dans le référentiel corotatif est également radialement vers l'extérieur, puisque dφ ′/ dt = 0. La force de Coriolis fictive a donc une valeur de −2m ( dr / dt ) Ω , dirigée uniquement dans le sens croissant de φ . Ainsi, en utilisant ces forces dans la deuxième loi de Newton, on obtient : où les points de suspension représentent les dérivées par rapport au temps, et F est la force réelle résultante (par opposition aux forces fictives). En termes de composantes, cette équation vectorielle devient : ce qui peut être comparé aux équations du référentiel inertiel :
Cette comparaison, ainsi que la reconnaissance que par définition du référentiel co-rotatif à l'instant t, il a une vitesse de rotation Ω = dφ / dt , montre que nous pouvons interpréter les termes de l'accélération (multipliés par la masse de la particule) tels qu'ils se trouvent dans le référentiel inertiel comme l'opposé des forces centrifuges et de Coriolis qui seraient observées dans le référentiel co-rotatif instantané non inertiel.
Pour le mouvement général d'une particule (par opposition au mouvement circulaire simple), les forces centrifuge et de Coriolis dans le référentiel de la particule sont généralement rapportées au cercle osculateur instantané de son mouvement, et non à un centre fixe en coordonnées polaires. Pour plus de détails, voir force centripète .
Nous allons maintenant utiliser l'identité trigonométrique pour poursuivre :
Si les quantités radiale et angulaire sont proches l'une de l'autre, et donc proches d'une quantité commune et , on a . De plus, le cosinus de peut être approché par le développement de Taylor du cosinus à des termes linéaires près :
de sorte que et . Par conséquent, autour d'un domaine infinitésimalement petit de tout point,
Le système de coordonnées polaires est étendu à trois dimensions grâce à deux systèmes de coordonnées différents : les systèmes de coordonnées cylindriques et sphériques . Ces deux systèmes incluent les coordonnées polaires bidimensionnelles (ou planes) comme sous-ensemble. Le système de coordonnées cylindriques étend les coordonnées polaires en ajoutant une coordonnée de distance, tandis que le système sphérique ajoute une coordonnée angulaire.
Coordonnées cylindriques
Un système de coordonnées cylindriques avec radial , angle et hauteur .
Le système de coordonnées cylindriques est un système de coordonnées qui étend le système de coordonnées polaires bidimensionnel en ajoutant une troisième coordonnée mesurant la hauteur d'un point au-dessus du plan, de la même manière que le système de coordonnées cartésiennes est étendu à trois dimensions. Cette troisième coordonnée est notée , ce qui donne les trois coordonnées cylindriques . Ainsi, les trois coordonnées cylindriques peuvent être converties en coordonnées cartésiennes par .
Coordonnées sphériques
Un système de coordonnées sphériques. Convoqué selon la norme ISO 80000-2:2019. , , , et désignent respectivement la distance radiale, l'angle polaire (angle par rapport à l'axe polaire positif) et l'angle azimutal (angle de rotation par rapport au plan méridien initial).
Les coordonnées polaires peuvent également être étendues à trois dimensions à l'aide des coordonnées (ρ, φ, θ), où ρ est la distance au pôle, φ est l'angle par rapport à l'axe z (appelé colatitude ou zénith et mesuré de 0 à 180°), et θ est l'angle par rapport à l'axe x (comme dans les coordonnées polaires). Ce système de coordonnées, appelé système de coordonnées sphériques , est similaire au système de latitude et de longitude utilisé pour la Terre, la latitude δ étant le complément de φ, déterminé par δ = 90° − φ, et la longitude l étant mesurée par l = θ − 180°.
Les trois coordonnées sphériques sont converties en coordonnées cartésiennes par
Applications
Les coordonnées polaires sont bidimensionnelles et ne peuvent donc être utilisées que lorsque les points se situent sur un seul plan. Elles sont particulièrement adaptées aux phénomènes intrinsèquement liés à une direction et à une distance par rapport à un point central. Par exemple, les exemples précédents montrent comment des équations polaires élémentaires suffisent à définir des courbes, comme la spirale d'Archimède, dont l'équation dans le système de coordonnées cartésiennes serait beaucoup plus complexe. De plus, de nombreux systèmes physiques, tels que ceux concernant des corps en mouvement autour d'un point central ou des phénomènes prenant naissance en un point central, sont plus simples et plus intuitifs à modéliser à l'aide des coordonnées polaires. L'introduction du système polaire a été initialement motivée par l'étude des mouvements circulaires et orbitaux .
Position et navigation
Les coordonnées polaires sont fréquemment utilisées en navigation , car la destination ou la direction de déplacement peut être exprimée par un angle et une distance par rapport à l'objet considéré. Par exemple, les aéronefs utilisent une version légèrement modifiée des coordonnées polaires pour la navigation. Dans ce système, généralement utilisé pour tout type de navigation, le rayon 0° est généralement appelé cap 360, et les angles se poursuivent dans le sens horaire, contrairement au système mathématique où ils se poursuivent dans le sens antihoraire. Le cap 360 correspond au nord magnétique , tandis que les caps 90, 180 et 270 correspondent respectivement à l'est, au sud et à l'ouest magnétiques. Ainsi, un aéronef se déplaçant sur 5 milles nautiques plein est se déplacera sur 5 unités au cap 90 (prononcé « zéro-neuf-zéro » par le contrôle aérien ).
Les systèmes à asymétrie radiale peuvent également être modélisés à l'aide de coordonnées polaires. Par exemple, la directivité d' un microphone illustre sa réponse proportionnelle à un son incident provenant d'une direction donnée, et ces directivités peuvent être représentées par des courbes polaires. La courbe d'un microphone cardioïde standard, le microphone unidirectionnel le plus courant, peut être représentée par
Plus d articles de Worldlex Wiki
Revenez a l index pour explorer davantage de pages sur l histoire, la science, la culture, la geographie et la societe en francais.

 0
0 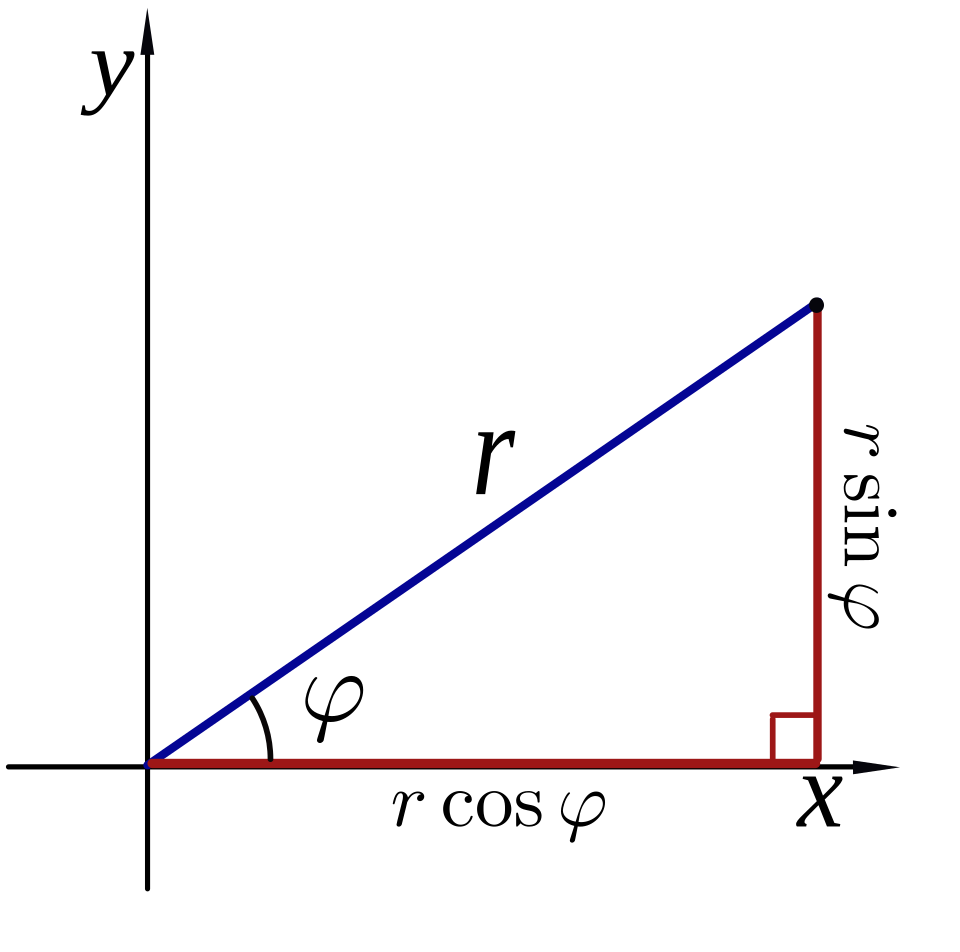
 0\\\arctan \left({\frac {y}{x}} ight)+\pi &{\mbox{si }}x<0{\mbox{ et }}y\geq 0\\\arctan \left({\frac {y}{x}} ight)-\pi &{\mbox{si }}x<0{\mbox{ et }}y<0\\{\frac {\pi }{2}}&{\mbox{si }}x=0{\mbox{ et }}y>0\\-{\frac {\pi }{2}}&{\mbox{si }}x=0{\mbox{ et }}y>0\\-{\frac {\pi }{2}}&{\mbox{si }}x=0{\mbox{ et }}y>0}\\-{\frac {\pi }{2}}&{\mbox{si }}x=0} ...\| }}y<0\\{ ext{indéfini}}&{\mbox{si }}x=0{\mbox{ et }}y=0.\end{cases
0\\\arctan \left({\frac {y}{x}} ight)+\pi &{\mbox{si }}x<0{\mbox{ et }}y\geq 0\\\arctan \left({\frac {y}{x}} ight)-\pi &{\mbox{si }}x<0{\mbox{ et }}y<0\\{\frac {\pi }{2}}&{\mbox{si }}x=0{\mbox{ et }}y>0\\-{\frac {\pi }{2}}&{\mbox{si }}x=0{\mbox{ et }}y>0\\-{\frac {\pi }{2}}&{\mbox{si }}x=0{\mbox{ et }}y>0}\\-{\frac {\pi }{2}}&{\mbox{si }}x=0} ...\| }}y<0\\{ ext{indéfini}}&{\mbox{si }}x=0{\mbox{ et }}y=0.\end{cases 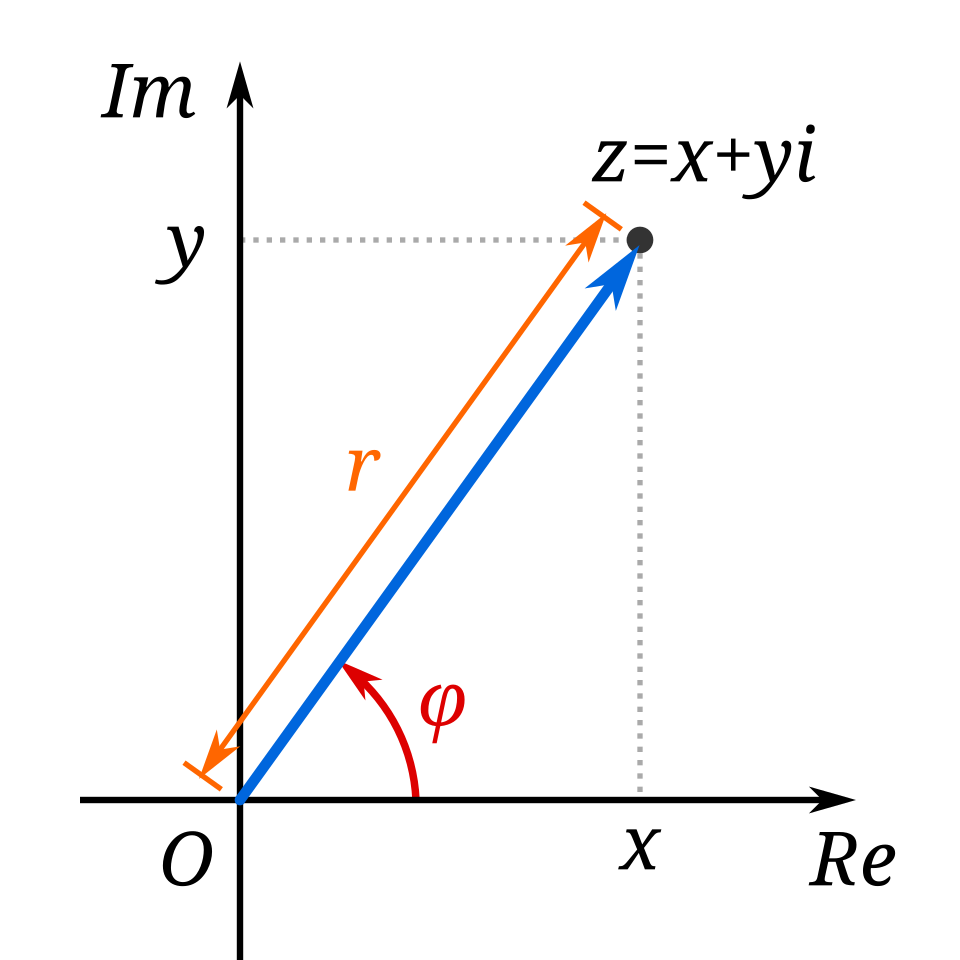
 1
1