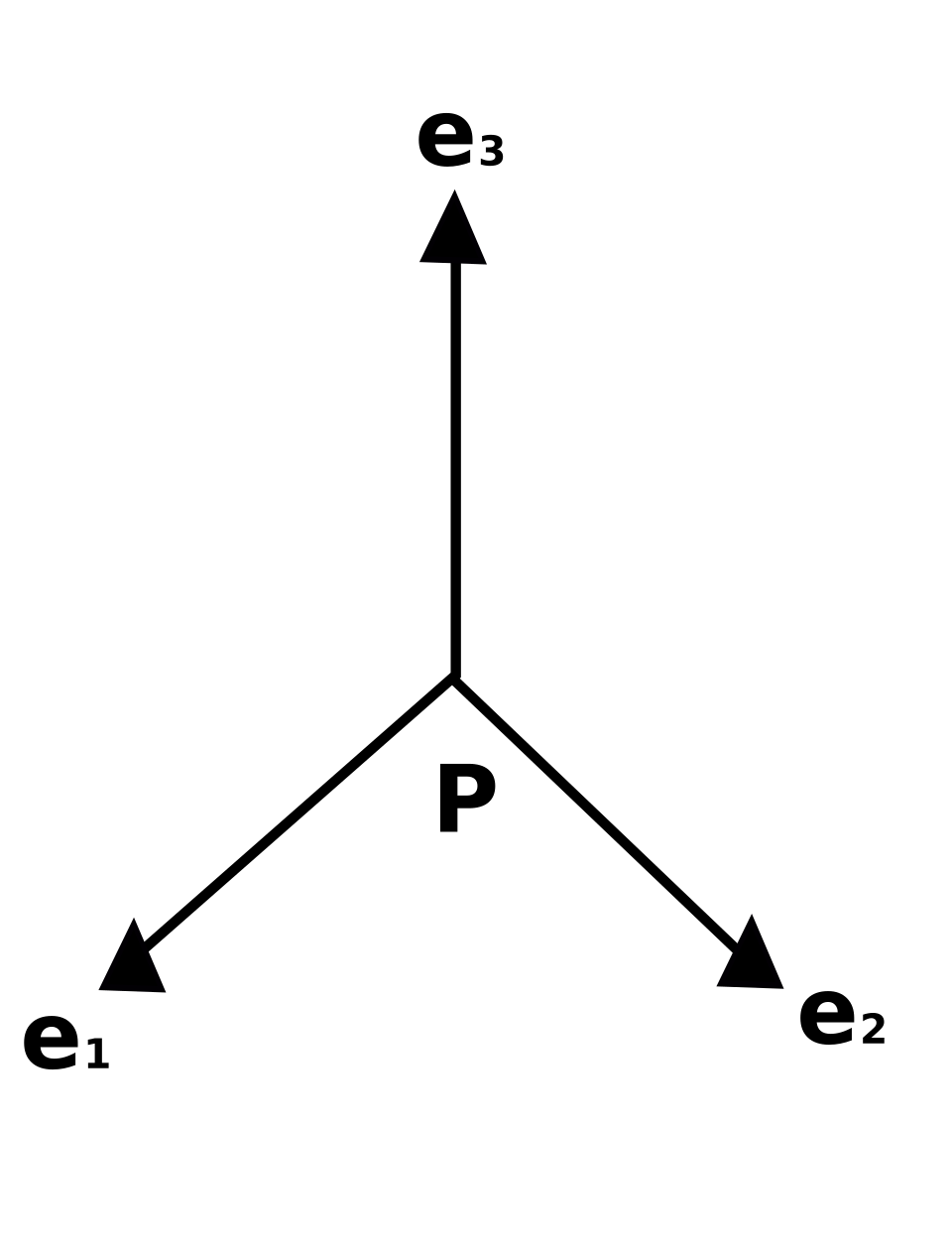
En mathématiques , un repère mobile est une généralisation flexible de la notion de repère de coordonnées (une base ordonnée d'un espace vectoriel , associée à une origine ) souvent utilisée pour étudier la géométrie différentielle extrinsèque des variétés lisses plongées dans un espace homogène .
référentiel est un système de repères utilisés par un observateur pour mesurer l'espace environnant à l'aide de coordonnées . Un référentiel mobile est alors un référentiel qui se déplace avec l'observateur le long d'une trajectoire (une courbe ). La méthode du référentiel mobile, dans cet exemple simple, vise à définir un référentiel mobile « privilégié » à partir des propriétés cinématiques de l'observateur. Dans un cadre géométrique, ce problème a été résolu au milieu du XIXe siècle par Jean Frédéric Frenet et Joseph Alfred Serret . Le référentiel de Frenet-Serret est un référentiel mobile défini sur une courbe et qui peut être construit uniquement à partir de la vitesse et de l'accélération de cette courbe.Le repère de Frenet-Serret joue un rôle fondamental en géométrie différentielle des courbes , permettant une classification quasi complète des courbes lisses de l'espace euclidien à congruence près . Les formules de Frenet-Serret montrent l'existence d'une paire de fonctions définies sur la courbe, la torsion et la courbure , obtenues par différentiation du repère, et qui décrivent intégralement son évolution temporelle le long de la courbe. Une caractéristique essentielle de la méthode générale est qu'un repère mobile privilégié, s'il existe, fournit une description cinématique complète de la courbe.
À la fin du XIXe siècle, Gaston Darboux étudia le problème de la construction d'un repère mobile privilégié sur une surface de l'espace euclidien plutôt que sur une courbe, le repère de Darboux (ou trièdre mobile, comme on l'appelait alors). Il s'avéra impossible en général de construire un tel repère, et qu'il existait des conditions d'intégrabilité qui devaient être satisfaites au préalable.
Par la suite, les repères mobiles ont été largement développés par Élie Cartan et d'autres dans le cadre de l'étude des sous-variétés d' espaces homogènes plus généraux (tels que l'espace projectif ). Dans ce contexte, un repère transpose l'idée géométrique de base d'un espace vectoriel à d'autres types d'espaces géométriques ( géométries de Klein ). Voici quelques exemples de repères :
- Un base ordonnée d'un espace vectoriel .
- Un repère orthonormé d'un espace vectoriel est une base ordonnée constituée de vecteurs unitaires orthogonaux (une base orthonormée ).
- Un repère affine d'un espace affine consiste en un choix d' origine ainsi qu'en une base ordonnée de vecteurs dans l' espace de différence associé .
- Un repère cartésien d'un espace affine est un choix d'origine associé à une base orthonormée de l'espace des différences.
- Un cadre projectif sur un espace projectif à n dimensions est une collection ordonnée de n + 2 points telle que tout sous-ensemble de n + 1 points soit linéairement indépendant .
- Les champs de repères en relativité générale sont des repères à quatre dimensions, ou vierbeins , en allemand.
Dans chacun de ces exemples, l'ensemble des repères est homogène au sens d'une certaine homogénéité. Dans le cas des repères linéaires, par exemple, deux repères quelconques sont liés par un élément du groupe linéaire général . Les repères projectifs sont liés par le groupe linéaire projectif . Cette homogénéité, ou symétrie, de la classe des repères traduit les caractéristiques géométriques du paysage linéaire, affine, euclidien ou projectif. Un repère mobile, dans ces conditions, est précisément cela : un repère qui varie d'un point à l'autre.
Formellement, un repère sur un espace homogène G / H est constitué d'un point du fibré tautologique G → G / H . Un repère mobile est une section de ce fibré. Il est mobile au sens où, lorsque le point de base change, le repère dans la fibre change d'un élément du groupe de symétrie G. Un repère mobile sur une sous-variété M de G / H est une section du produit fibré du fibré tautologique sur M. Intrinsèquement un repère mobile peut être défini sur un fibré principal P au-dessus d'une variété. Dans ce cas, un repère mobile est donné par une application φ : P → G - équivariante , encadrant ainsi la variété par des éléments du groupe de Lie G.
On peut étendre la notion de repères à un cas plus général : on peut « souder » un faisceau de fibres à une variété différentiable , de sorte que les fibres se comportent comme si elles étaient tangentes. Lorsque le faisceau de fibres est un espace homogène, cela se réduit au corps de repères décrit précédemment. Lorsque l’espace homogène est un quotient de groupes orthogonaux spéciaux , cela se réduit à la conception classique d’un vierbein .
Bien qu'il existe une différence formelle substantielle entre les repères mobiles extrinsèques et intrinsèques, ils sont semblables en ce sens qu'un repère mobile est toujours défini par une application dans G. La stratégie de la méthode des repères mobiles de Cartan , brièvement décrite dans la méthode d'équivalence de Cartan , consiste à trouver un repère mobile naturel sur la variété, puis à calculer sa dérivée de Darboux , autrement dit à effectuer un pullback de la forme de Maurer-Cartan de G sur M (ou P ), et ainsi obtenir un ensemble complet d'invariants structurels pour la variété.
Méthode du cadre mobile
groupe de Lie G.
On suppose alors que les axiomes suivants sont vérifiés entre ces éléments :
- Il existe une action de groupe libre et transitive de G sur la collection de cadres : c'est un espace homogène principal pour G. En particulier, pour toute paire de cadres ƒ et ƒ ′ , il existe une transition unique de cadre (ƒ→ƒ ′ ) dans G déterminée par l'exigence (ƒ→ƒ ′ )ƒ = ƒ ′ .
- Étant donné un repère ƒ et un point A ∈ X , il existe un point x = ( A , ƒ) appartenant à Σ. Cette application, déterminée par le repère ƒ, est une bijection des points de X vers ceux de Σ. Cette bijection est compatible avec la loi de composition des repères, en ce sens que la coordonnée x ′ du point A dans un autre repère ƒ ′ provient de ( A , ƒ) par application de la transformation (ƒ → ƒ ′ ). Autrement dit,
Cette méthode s'intéresse aux sous-variétés paramétrées de X. Les considérations étant essentiellement locales, le domaine des paramètres est un ouvert de R<sup> λ </sup>. Des techniques légèrement différentes s'appliquent selon que l'on s'intéresse à la sous-variété et à sa paramétrisation, ou à la sous-variété à une reparamétrisation près.
Cadres tangents mobiles
Atlas
Dans de nombreux cas, il est impossible de définir un repère unique valable globalement. Pour pallier cette difficulté, on assemble généralement des repères pour former un atlas , aboutissant ainsi à la notion de repère local . De plus, il est souvent souhaitable de doter ces atlas d'une structure lisse , afin que les champs de repères résultants soient différentiables.
Généralisations
Bien que cet article construise les champs de repères comme un système de coordonnées sur le fibré tangent d'une variété , les idées générales se transposent facilement au concept de fibré vectoriel , qui est une variété munie d'un espace vectoriel en chaque point, cet espace vectoriel étant arbitraire et n'étant généralement pas lié au fibré tangent.
Applications
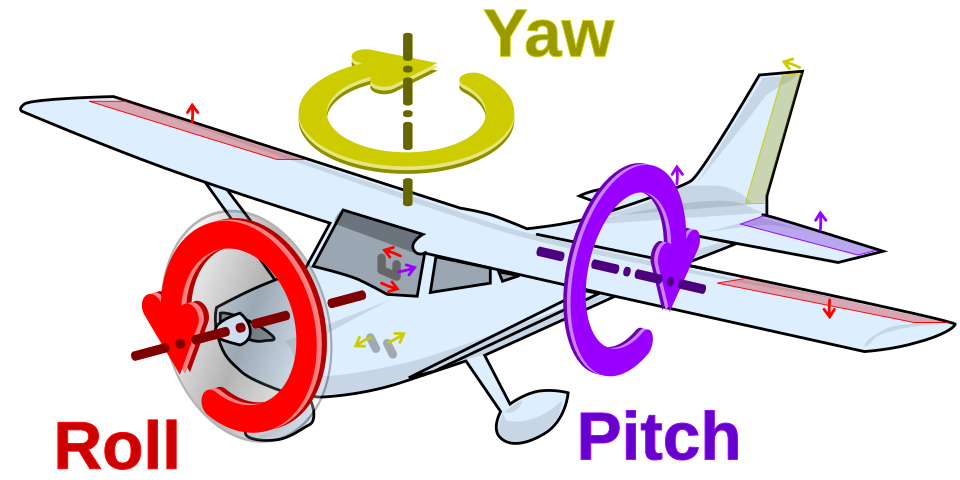
Les repères fixes sont largement utilisés en mécanique des corps rigides . Les manœuvres d'un aéronef peuvent être exprimées en fonction du repère mobile ( axes principaux de l'aéronef ) lorsqu'elles sont décrites par le pilote.