
Une conique , ou courbe quadratique, est une courbe obtenue par l'intersection de la surface d'un cône avec un plan . Les trois types de coniques sont l' hyperbole , la parabole et l' ellipse ; le cercle est un cas particulier de l'ellipse, bien qu'il ait parfois été considéré comme un quatrième type. Les mathématiciens grecs de l'Antiquité ont étudié les coniques, et leurs travaux ont culminé vers 200 av. J.-C. avec l'étude systématique de leurs propriétés par Apollonius de Perga .
Les coniques du plan euclidien possèdent diverses propriétés distinctives, dont plusieurs peuvent servir de définitions alternatives. L'une de ces propriétés définit une conique non circulaire comme l' ensemble des points dont les distances à un point particulier, appelé foyer , et à une droite particulière, appelée directrice , sont dans un rapport fixe, appelé excentricité . Le type de conique est déterminé par la valeur de l'excentricité. En géométrie analytique , une conique peut être définie comme une courbe algébrique plane de degré 2 ; c'est-à-dire comme l'ensemble des points dont les coordonnées satisfont une équation du second degré à deux inconnues qui peut s'écrire sous la forme suivante : [ formule mathématique ]. Les propriétés géométriques de la conique peuvent être déduites de son équation.
Dans le plan euclidien, les trois types de coniques semblent très différents, mais partagent de nombreuses propriétés. En étendant le plan euclidien à l'infini, on obtient un plan projectif ; la différence apparente disparaît alors : les branches d'une hyperbole se rejoignent en deux points à l'infini, formant une courbe fermée unique ; et les deux extrémités d'une parabole se rejoignent pour former une courbe fermée tangente à l'infini. Une extension supplémentaire, par l'intégration des coordonnées complexes aux coordonnées réelles , permet de visualiser algébriquement cette unification.
géométrie euclidienne
Les sections coniques sont étudiées depuis des milliers d'années et ont fourni une riche source de résultats intéressants et esthétiques en géométrie euclidienne .
Définition
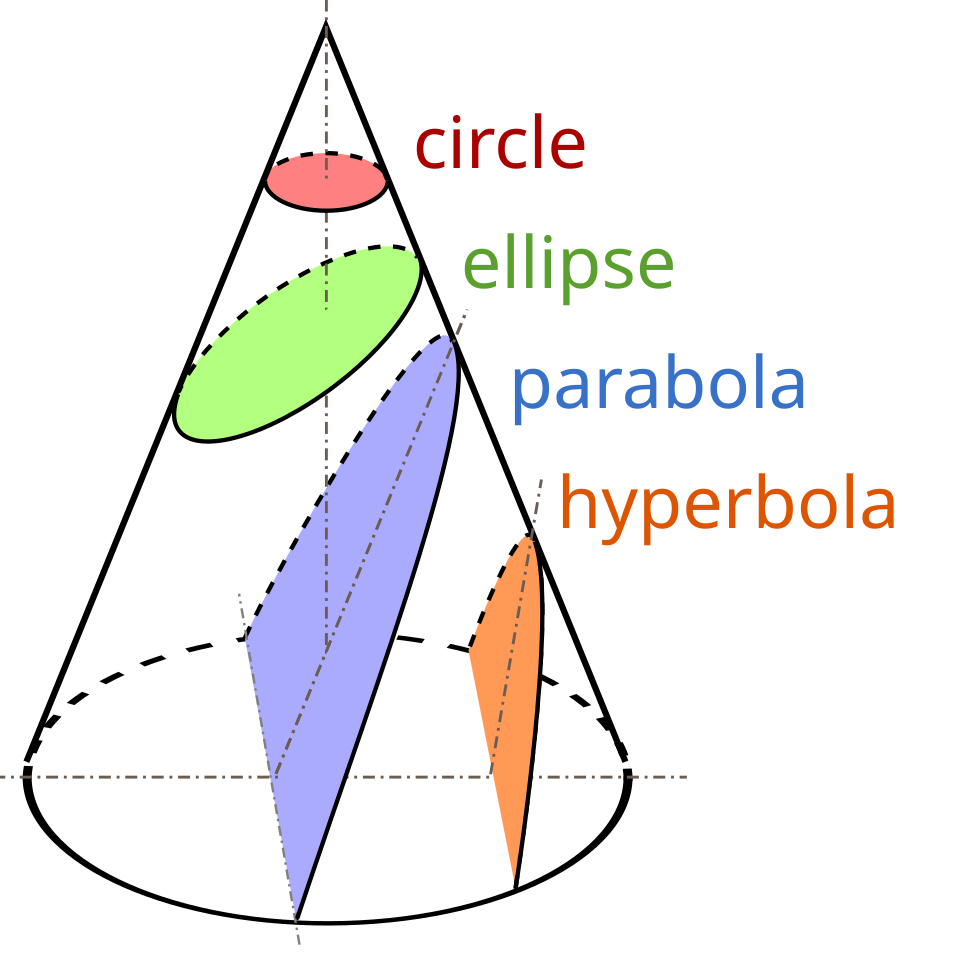
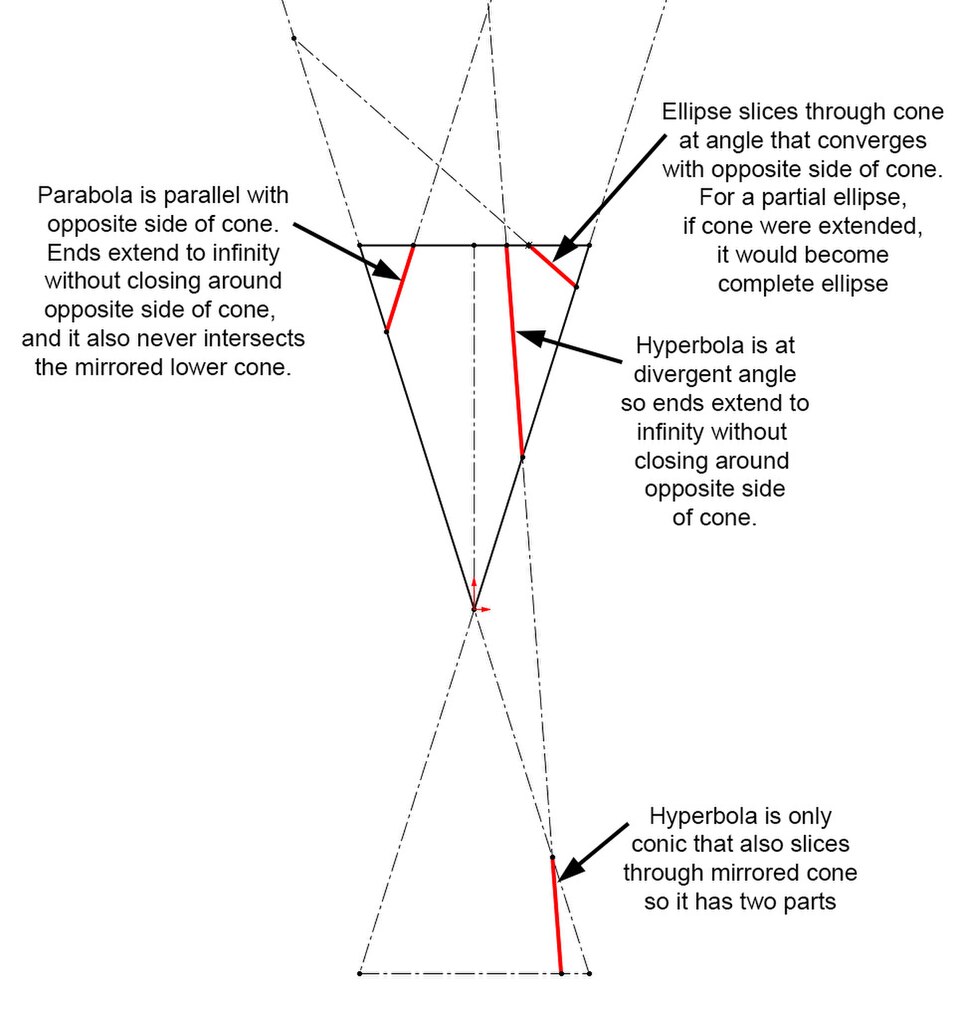
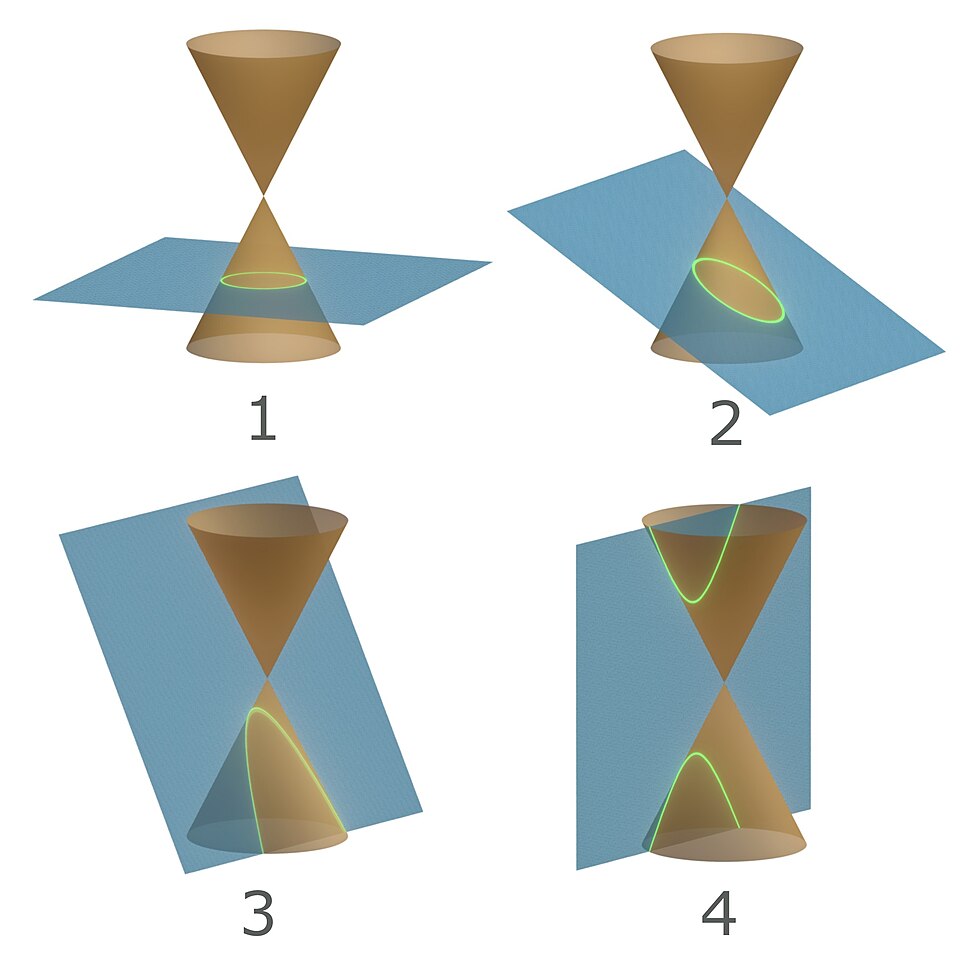
Une conique est la courbe obtenue par l'intersection d'un plan , appelé plan de coupe , avec la surface d'un cône bifide (un cône à deux nappes ). On suppose généralement, par souci de simplification, que le cône est un cône circulaire droit, mais cela n'est pas obligatoire ; tout cône bifide à section circulaire convient. Les plans passant par le sommet du cône l'intersectent en un point, une droite ou une paire de droites sécantes. On les appelle coniques dégénérées , et certains auteurs ne les considèrent pas comme des coniques. Sauf indication contraire, le terme « conique » dans cet article désigne une conique non dégénérée.
Il existe trois types de coniques : l’ ellipse , la parabole et l’hyperbole . Le cercle est un cas particulier d’ellipse, bien qu’Apollonius l’ait historiquement considéré comme un quatrième type. Les ellipses apparaissent lorsque l’intersection du cône et du plan est une courbe fermée . Le cercle est obtenu lorsque le plan de coupe est parallèle au plan du cercle générateur du cône ; pour un cône droit, cela signifie que le plan de coupe est perpendiculaire à l’axe. Si le plan de coupe est parallèle à une seule génératrice du cône, la conique est alors infinie et est appelée parabole . Dans le cas restant, la figure est une hyperbole : le plan coupe les deux moitiés du cône, produisant deux courbes infinies distinctes.
Comparer également la section sphérique (intersection d'un plan avec une sphère, produisant un cercle ou un point) et la conique sphérique (intersection d'un cône elliptique avec une sphère concentrique).
Excentricité, concentration et mise en scène
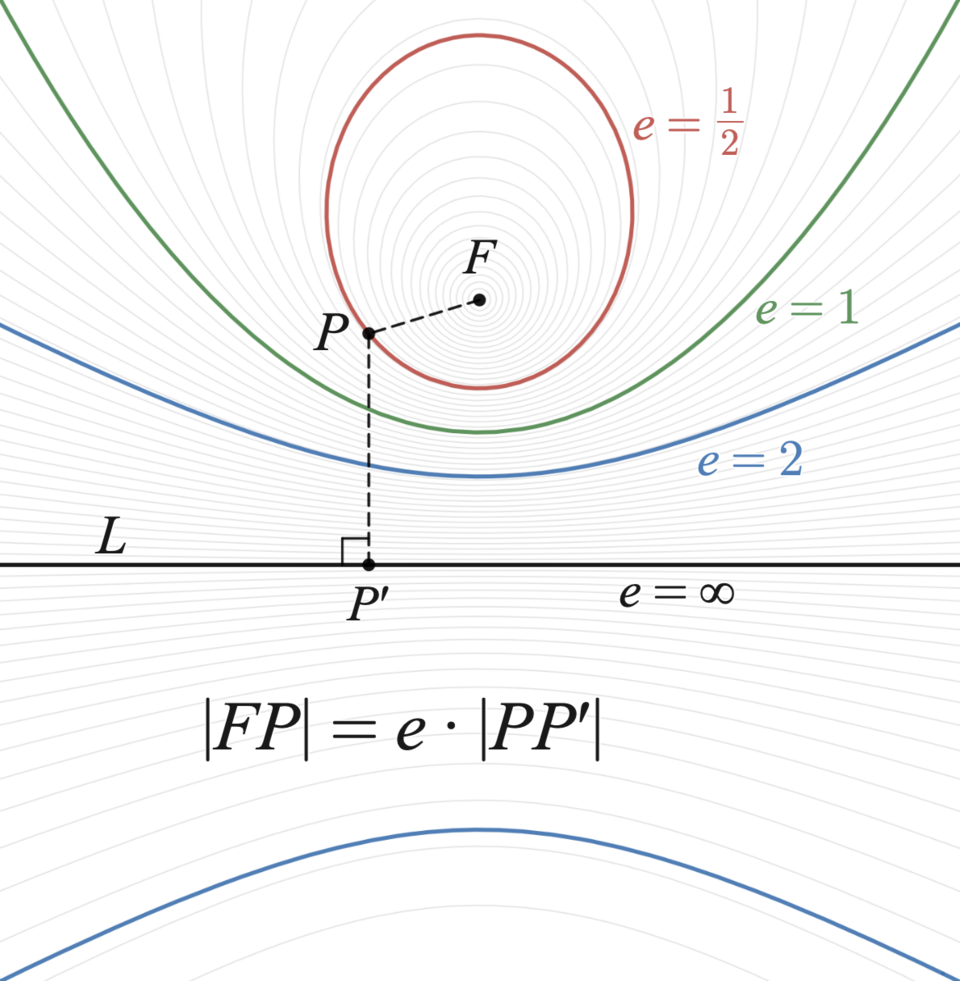
Alternatively, one can define a conic section purely in terms of plane geometry: it is the locus of all points P whose distance to a fixed point F (called the focus) is a constant multiple e (called the eccentricity) of the distance from P to a fixed line L (called the directrix). For 0 < e < 1 we obtain an ellipse, for e = 1 a parabola, and for e > 1 a hyperbola.
A circle is a limiting case and is not defined by a focus and directrix in the Euclidean plane. The eccentricity of a circle is defined to be zero and its focus is the center of the circle, but its directrix can only be taken as the line at infinity in the projective plane.
The eccentricity of an ellipse can be seen as a measure of how far the ellipse deviates from being circular.
If the angle between the surface of the cone and its axis is
A proof that the above curves defined by the focus-directrix property are the same as those obtained by planes intersecting a cone is facilitated by the use of Dandelin spheres.
Alternatively, an ellipse can be defined in terms of two focus points, as the locus of points for which the sum of the distances to the two foci is 2a; while a hyperbola is the locus for which the difference of distances is 2a. (Here a is the semi-major axis defined below.) A parabola may also be defined in terms of its focus and latus rectum line (parallel to the directrix and passing through the focus): it is the locus of points whose distance to the focus plus or minus the distance to the line is equal to 2a; plus if the point is between the directrix and the latus rectum, minus otherwise.
Conic parameters
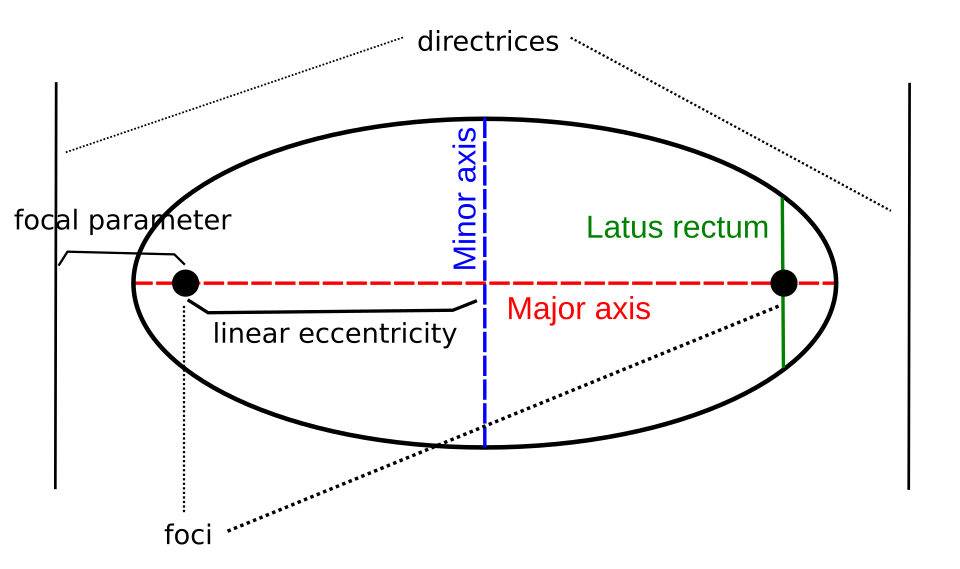
In addition to the eccentricity (e), foci, and directrix, various geometric features and lengths are associated with a conic section.
The principal axis is the line joining the foci of an ellipse or hyperbola, and its midpoint is the curve's center. A parabola has no center.
The linear eccentricity (c) is the distance between the center and a focus.
Le latus rectum est la corde parallèle à la directrice et passant par un foyer ; sa demi-longueur est le semi-latus rectum ( ℓ ).
Le paramètre focal ( p ) est la distance entre un foyer et la directrice correspondante.
Le grand axe est la corde reliant deux sommets : la corde la plus longue d'une ellipse, la corde la plus courte reliant les branches d'une hyperbole. Sa moitié est le demi-grand axe ( a ). Lorsqu'une ellipse ou une hyperbole est en position standard, comme dans les équations ci-dessous, avec les foyers sur l' axe des abscisses et le centre à l'origine, les sommets de la conique ont pour coordonnées (−a , 0) et ( a , 0) , avec a non négatif.
Le petit axe est le diamètre le plus court d'une ellipse, et sa moitié est le demi-petit axe ( b ), qui a la même valeur que dans l'équation standard ci-dessous. Par analogie, pour une hyperbole, le paramètre b de l'équation standard est également appelé demi-petit axe.
Les relations suivantes sont vérifiées :
Pour les coniques en position standard, ces paramètres ont les valeurs suivantes, en prenant . 
| section conique | équation | excentricité ( e ) | excentricité linéaire ( c ) | rectum semi-latus ( ℓ ) | paramètre focal ( p ) |
|---|---|---|---|---|---|
| cercle | |||||
| ellipse | |||||
| parabole | N / A | ||||
| hyperbole |
Formes standard en coordonnées cartésiennes


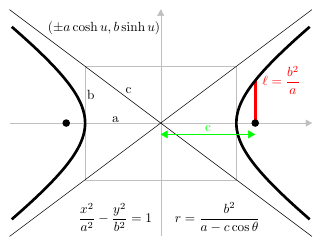
Après l'introduction des coordonnées cartésiennes , la propriété foyer-directrice permet d'établir les équations satisfaites par les points de la conique. Par un changement de coordonnées ( rotation et translation des axes ), ces équations peuvent être mises sous forme canonique . Pour les ellipses et les hyperboles, la forme canonique a pour axe principal l'axe des abscisses et pour centre l'origine (0,0). Les sommets sont (± a , 0) et les foyers (± c , 0) . On définit b par les équations c² = a² − b² pour une ellipse et c² = a² + b² pour une hyperbole. Pour un cercle, c = 0, donc a² = b² , avec un rayon r = a = b . Pour la parabole, la forme standard a pour foyer l' axe des x au point ( a , 0) et pour directrice la droite d'équation x = −a . Sous forme standard, la parabole passe toujours par l'origine.
Pour une hyperbole rectangulaire ou équilatérale , dont les asymptotes sont perpendiculaires, il existe une forme canonique alternative dans laquelle les asymptotes sont les axes de coordonnées et la droite x = y est l'axe principal. Les foyers ont alors pour coordonnées ( c , c ) et ( −c , −c ) .
- Cercle:
- Ellipse:
- Parabole:
0,
- Hyperbole:
- Hyperbole rectangulaire :
Les quatre premières de ces formes sont symétriques par rapport à la fois à l' axe des x et à l'axe des y (pour le cercle, l'ellipse et l'hyperbole), ou par rapport à l' axe des x seulement (pour la parabole). L'hyperbole rectangulaire, en revanche, est symétrique par rapport aux droites y = x et y = − x .
Ces formes standard peuvent être écrites paramétriquement comme suit :
- Cercle :
- Ellipse :
- Parabole :
- Hyperbole :
- Hyperbole rectangulaire :
Forme cartésienne générale
Dans le système de coordonnées cartésiennes , le graphique d'une équation quadratique à deux variables est toujours une conique (même si elle peut être dégénérée ), et toutes les coniques sont obtenues de cette manière. L'équation la plus générale est de la forme
avec tous les coefficients des nombres réels et A, B, C non tous nuls.
Notation matricielle
L'équation ci-dessus peut être écrite sous forme matricielle comme
L'équation générale peut également s'écrire comme suit :
Cette forme est une spécialisation de la forme homogène utilisée dans le cadre plus général de la géométrie projective (voir ci -dessous ).
Discriminant
Les sections coniques décrites par cette équation peuvent être classées en fonction de la valeur de Δ , appelée discriminant de l'équation. Ainsi, le discriminant est − 4Δ où Δ est le déterminant de la matrice.
Si la conique est non dégénérée , alors :
- si B 2 − 4 AC < 0 , l'équation représente une ellipse ;
- si A = C et B = 0 , l'équation représente un cercle , qui est un cas particulier d'ellipse ;
- si B 2 − 4 AC = 0 , l'équation représente une parabole ;
- si B 2 − 4 AC > 0 , l'équation représente une hyperbole ;
- si A + C = 0 , l'équation représente une hyperbole rectangulaire .
Dans la notation utilisée ici, A et B sont des coefficients polynomiaux , contrairement à certaines sources qui désignent les demi-axes majeur et mineur par A et B.
Invariants
Le discriminant B² – 4AC de l'équation quadratique de la conique (ou, de manière équivalente, le déterminant AC – B² / 4 de la matrice 2 × 2) et la quantité A + C (la trace de la matrice 2 × 2) sont invariants par rotation et translation arbitraires des axes de coordonnées , de même que le déterminant de la matrice 3 × 3 mentionnée précédemment [ Le terme constant F et la somme D² + E² sont invariants uniquement par rotation .
Excentricité en termes de coefficients
Lorsque la section conique est écrite algébriquement comme
L'excentricité peut s'écrire en fonction des coefficients de l'équation du second degré. Si 4 AC = B 2 , la conique est une parabole et son excentricité est égale à 1 (à condition qu'elle soit non dégénérée). Sinon, en supposant que l'équation représente une hyperbole ou une ellipse non dégénérée, l'excentricité est donnée par
où η = 1 si le déterminant de la matrice 3 × 3 ci-dessus est négatif et η = −1 si ce déterminant est positif.
On peut également montrer que l'excentricité est une solution positive de l'équation
où, encore une fois, ceci a précisément une seule solution positive — l'excentricité — dans le cas d'une parabole ou d'une ellipse, tandis que dans le cas d'une hyperbole, elle a deux solutions positives, dont l'une est l'excentricité.
Conversion en forme canonique
Dans le cas d'une ellipse ou d'une hyperbole, l'équation
peut être converti en forme canonique dans des variables transformées comme
ou de manière équivalente
où et sont les valeurs propres de la matrice — c'est-à-dire les solutions de l'équation
— et est le déterminant de la matrice 3 × 3 ci-dessus , et est à nouveau le déterminant de la matrice 2 × 2. Dans le cas d'une ellipse, les carrés des deux demi-axes sont donnés par les dénominateurs sous forme canonique.
Coordonnées polaires
En coordonnées polaires , une conique ayant un foyer à l'origine et, le cas échéant, l'autre à une valeur négative (pour une ellipse) ou positive (pour une hyperbole) sur l' axe des x , est donnée par l'équation suivante :
où e est l'excentricité et l est le semi-latus rectum.
Comme ci-dessus, pour e = 0 , le graphique est un cercle, pour 0 < e < 1, le graphique est une ellipse, pour e = 1 , une parabole et pour e > 1, une hyperbole.
La forme polaire de l'équation d'une conique est souvent utilisée en dynamique ; par exemple, pour déterminer les orbites des objets tournant autour du Soleil.
Propriétés
De même que deux points distincts définissent une droite, cinq points définissent une conique . Formellement, étant donnés cinq points quelconques du plan en position linéaire générale (c'est-à-dire trois points différents de ceux alignés) , il existe une unique conique passant par ces cinq points, et cette conique est non dégénérée. Ceci est vrai aussi bien dans le plan euclidien que dans son extension, le plan projectif réel. En effet, étant donné cinq points quelconques, il existe toujours une conique passant par ces cinq points, mais si trois de ces points sont alignés, la conique est dégénérée (réductible, car elle contient une droite) et peut ne pas être unique ; voir la discussion plus approfondie .
Quatre points du plan en position linéaire générale définissent une conique unique passant par les trois premiers points et ayant le quatrième point pour centre. Ainsi, connaître le centre équivaut à connaître deux points de la conique pour déterminer la courbe.
De plus, une conique est déterminée par toute combinaison de k points en position générale qu'elle traverse et de 5 – k lignes qui lui sont tangentes, pour 0≤ k ≤5.
Tout point du plan appartient à zéro, une ou deux tangentes à une conique. Un point appartenant à une seule tangente est à l'intérieur de la conique. Un point n'appartenant à aucune tangente est dit intérieur à la conique, tandis qu'un point appartenant à deux tangentes est dit extérieur .
Toutes les sections coniques partagent une propriété de réflexion qui peut s'énoncer ainsi : tous les miroirs en forme de section conique non dégénérée réfléchissent la lumière provenant d'un foyer ou s'en approchant vers l'autre foyer ou s'en éloignant. Dans le cas de la parabole, le second foyer doit être considéré comme infiniment éloigné, de sorte que les rayons lumineux provenant ou se dirigeant vers ce foyer sont parallèles.
Le théorème de Pascal concerne la colinéarité de trois points construits à partir d'un ensemble de six points sur une conique non dégénérée quelconque. Ce théorème est également valable pour les coniques dégénérées composées de deux droites, mais dans ce cas, il est connu sous le nom de théorème de Pappus .
Les sections coniques non dégénérées sont toujours « lisses ». Ceci est important pour de nombreuses applications, telles que l'aérodynamique, où une surface lisse est nécessaire pour assurer un écoulement laminaire et éviter les turbulences .
Histoire
Ménaechme et les premières œuvres
On attribue la première définition d'une section conique à Ménaechme (mort en 320 av. J.-C.) dans le cadre de sa solution au problème de Délos ( la duplication du cube ). Son œuvre a disparu, pas même les noms qu'il donnait à ces courbes, et n'est connue que par des sources indirectes. La définition alors en vigueur diffère de celle couramment employée aujourd'hui. Les cônes étaient construits en faisant pivoter un triangle rectangle autour de l'un de ses côtés de l'angle droit, de sorte que l'hypoténuse engendre la surface du cône (cette droite est appelée génératrice ). Trois types de cônes étaient déterminés par leurs angles au sommet (mesurés par le double de l'angle formé par l'hypoténuse et le côté de l'angle droit autour duquel on effectue la rotation du triangle rectangle). La section conique était ensuite déterminée par l'intersection de l'un de ces cônes avec un plan perpendiculaire à la génératrice. Le type de conique est déterminé par le type de cône, c'est-à-dire par l'angle formé au sommet du cône : si l'angle est aigu, la conique est une ellipse ; si l'angle est droit, la conique est une parabole ; et si l'angle est obtus, la conique est une hyperbole (mais seulement une branche de la courbe).
Euclide (actif vers 300 av. J.-C.) aurait écrit quatre livres sur les coniques, mais ceux-ci sont aujourd'hui perdus. Archimède (mort vers 212 av. J.-C.) est connu pour avoir étudié les coniques, notamment en déterminant l'aire délimitée par une parabole et une corde dans son ouvrage « Quadrature de la parabole » . Son principal intérêt portait sur la mesure des aires et des volumes de figures liées aux coniques, et une partie de ce travail nous est parvenue dans son ouvrage sur les solides de révolution des coniques, « Sur les conoïdes et les sphéroïdes » .
Apollonius de Perga
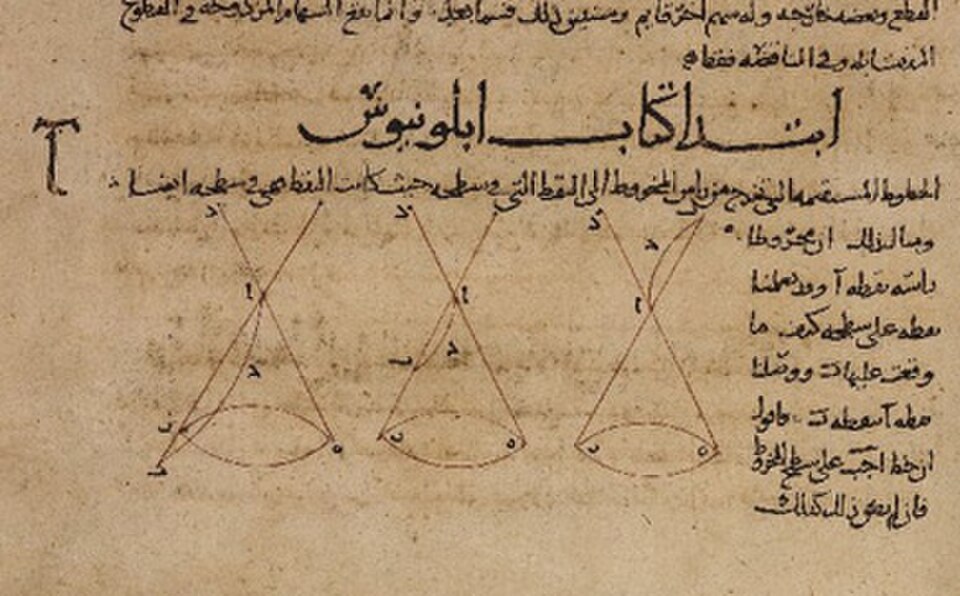
Les progrès les plus importants dans l'étude des coniques par les Grecs anciens sont dus à Apollonius de Perga (mort vers 190 av. J.-C.), dont les huit volumes des <i>Sections coniques </i> ont résumé et considérablement enrichi les connaissances existantes. L'étude par Apollonius des propriétés de ces courbes a permis de démontrer que tout plan coupant un cône double fixe (à deux nappes), quel que soit son angle, produit une conique selon la définition antérieure, aboutissant à la définition couramment utilisée aujourd'hui. Les cercles, impossibles à construire par la méthode antérieure, sont également obtenus de cette manière. Ceci explique peut-être pourquoi Apollonius considérait les cercles comme un quatrième type de section conique, une distinction qui n'est plus faite. Apollonius utilisait les noms d'« ellipse », de « parabole » et d'« hyperbole » pour ces courbes, empruntant la terminologie aux travaux pythagoriciens antérieurs sur les aires.
Pappus d'Alexandrie (mort vers 350 ap. J.-C.) est crédité d'avoir exposé l'importance du concept de foyer d'une conique et d'avoir détaillé le concept connexe de directrice , y compris le cas de la parabole (qui est absent des œuvres connues d'Apollonius).
monde islamique
L'œuvre d'Apollonius a été traduite en arabe, et une grande partie de son travail ne nous est parvenue que par cette version. Les mathématiciens islamiques ont trouvé des applications à cette théorie, notamment le mathématicien et poète persan Omar Khayyam [ qui a mis au point une méthode géométrique de résolution des équations cubiques à l'aide de sections coniques.
Un siècle avant l'œuvre plus célèbre de Khayyam, Abu al-Jud a utilisé des coniques pour résoudre des équations quartiques et cubiques, bien que sa solution ne traite pas tous les cas.
Un instrument pour tracer des sections coniques a été décrit pour la première fois en 1000 après J.-C. par Al-Kuhi .
Europe

Johannes Kepler a étendu la théorie des coniques grâce au « principe de continuité », précurseur du concept de limites. Kepler a utilisé pour la première fois le terme « foyers » en 1604.
Girard Desargues et Blaise Pascal ont élaboré une théorie des coniques à partir d'une forme primitive de géométrie projective , contribuant ainsi à dynamiser l'étude de ce nouveau domaine. Pascal a notamment découvert un théorème, l' hexagramme mystique, à partir duquel on peut déduire de nombreuses autres propriétés des coniques.
René Descartes et Pierre Fermat appliquèrent tous deux la géométrie analytique, qu'ils venaient de découvrir , à l'étude des coniques. Ceci eut pour effet de ramener les problèmes géométriques des coniques à des problèmes d'algèbre. Cependant, c'est John Wallis, dans son traité de 1655, le Tractatus de sectionibus conicis, qui définit le premier les sections coniques comme des instances d'équations du second degré. Écrit antérieurement, mais publié plus tard, l' ouvrage de Jan de Witt , Elementa Curvarum Linearum, part de la construction cinématique des coniques par Kepler et développe ensuite les équations algébriques. Ce travail, qui utilise la méthodologie de Fermat et la notation de Descartes, est considéré comme le premier manuel sur le sujet. De Witt inventa le terme « directrice ».
Applications
Les coniques sont importantes en astronomie : les orbites de deux objets massifs interagissant selon la loi de la gravitation universelle de Newton sont des coniques si leur centre de masse commun est considéré comme immobile. S'ils sont liés, leurs orbites respectives sont des ellipses ; s'ils s'éloignent l'un de l'autre, leurs orbites respectives sont des paraboles ou des hyperboles. Voir le problème à deux corps .
Les propriétés réfléchissantes des sections coniques sont exploitées dans la conception des projecteurs, des radiotélescopes et de certains télescopes optiques. Un projecteur utilise un miroir parabolique comme réflecteur, avec une ampoule au foyer ; une construction similaire est utilisée pour un microphone parabolique . Le télescope optique Herschel de 4,2 mètres , situé à La Palma, dans les îles Canaries, utilise un miroir parabolique primaire pour réfléchir la lumière vers un miroir hyperbolique secondaire, qui la réfléchit à nouveau vers un foyer situé derrière le premier miroir.
Dans le plan projectif réel
Les coniques présentent des propriétés très similaires dans le plan euclidien, et les raisons de cette similarité apparaissent plus clairement lorsqu'on les considère dans le cadre d'une géométrie plus vaste. Le plan euclidien peut être plongé dans le plan projectif réel , et les coniques peuvent être considérées comme des objets de cette géométrie projective. Une manière d'y parvenir est d'introduire les coordonnées homogènes et de définir une conique comme l'ensemble des points dont les coordonnées satisfont une équation quadratique irréductible à trois variables (ou, de façon équivalente, les zéros d'une forme quadratique irréductible ). Plus précisément, l'ensemble des points qui sont les zéros d'une forme quadratique (à un nombre quelconque de variables) est appelé une quadrique , et les quadriques irréductibles dans un espace projectif bidimensionnel (c'est-à-dire à trois variables) sont traditionnellement appelées coniques.
Le plan euclidien ℝ² est plongé dans le plan projectif réel en ajoutant une droite à l'infini (et ses points correspondants à l'infini ) de sorte que toutes les droites d'une même classe parallèle se rencontrent sur cette droite. Réciproquement, à partir du plan projectif réel, on obtient un plan euclidien en identifiant une droite comme étant la droite à l'infini et en la supprimant ainsi que tous ses points.
Intersection à l'infini
Dans un espace projectif sur un anneau à division quelconque, et en particulier sur l'ensemble des nombres réels ou complexes, toutes les coniques non dégénérées sont équivalentes ; ainsi, en géométrie projective, on parle d'« une conique » sans préciser de type. Autrement dit, il existe une transformation projective qui envoie toute conique non dégénérée sur toute autre conique non dégénérée.
The three types of conic sections will reappear in the affine plane obtained by choosing a line of the projective space to be the line at infinity. The three types are then determined by how this line at infinity intersects the conic in the projective space. In the corresponding affine space, one obtains an ellipse if the conic does not intersect the line at infinity, a parabola if the conic intersects the line at infinity in one double point corresponding to the axis, and a hyperbola if the conic intersects the line at infinity in two points corresponding to the asymptotes.
Homogeneous coordinates
In homogeneous coordinates a conic section can be represented as:
Or in matrix notation
The 3 × 3 matrix above is called the matrix of the conic section.
Some authors prefer to write the general homogeneous equation as
(or some variation of this) so that the matrix of the conic section has the simpler form,
but this notation is not used in this article.
If the determinant of the matrix of the conic section is zero, the conic section is degenerate.
As multiplying all six coefficients by the same non-zero scalar yields an equation with the same set of zeros, one can consider conics, represented by (A, B, C, D, E, F) as points in the five-dimensional projective space
Projective definition of a circle
Metrical concepts of Euclidean geometry (concepts concerned with measuring lengths and angles) can not be immediately extended to the real projective plane. They must be redefined (and generalized) in this new geometry. This can be done for arbitrary projective planes, but to obtain the real projective plane as the extended Euclidean plane, some specific choices have to be made.
Soit une droite arbitraire du plan projectif appelée droite absolue . Choisissons deux points distincts sur cette droite absolue, que nous appellerons points absolus . Plusieurs concepts métriques peuvent être définis à partir de ces points. Par exemple, étant donné une droite contenant les points A et B , le milieu du segment AB est le point C , conjugué harmonique projectif du point d'intersection de AB et de la droite absolue, par rapport à A et B.
Une conique du plan projectif contenant les deux points absolus est appelée un cercle . Puisque cinq points définissent une conique, un cercle (qui peut être dégénéré) est défini par trois points. Pour obtenir le plan euclidien étendu, la droite absolue est choisie comme étant la droite à l'infini du plan euclidien et les points absolus sont deux points particuliers de cette droite appelés points circulaires à l'infini . Les droites contenant deux points à coordonnées réelles ne passent pas par les points circulaires à l'infini ; ainsi, dans le plan euclidien, un cercle, selon cette définition, est défini par trois points non alignés .
Il a été mentionné que les cercles du plan euclidien ne peuvent être définis par la propriété foyer-directrice. Cependant, si l'on considère la droite à l'infini comme directrice, alors, en prenant l'excentricité e = 0, un cercle possède la propriété foyer-directrice, sans pour autant être défini par cette propriété. Dans ce cas, il convient d'utiliser avec soin la définition de l'excentricité comme le rapport de la distance d'un point du cercle au foyer (longueur d'un rayon) à la distance de ce point à la directrice (cette distance étant infinie), ce qui donne la valeur limite de zéro.
Définition de la conique projective de Steiner
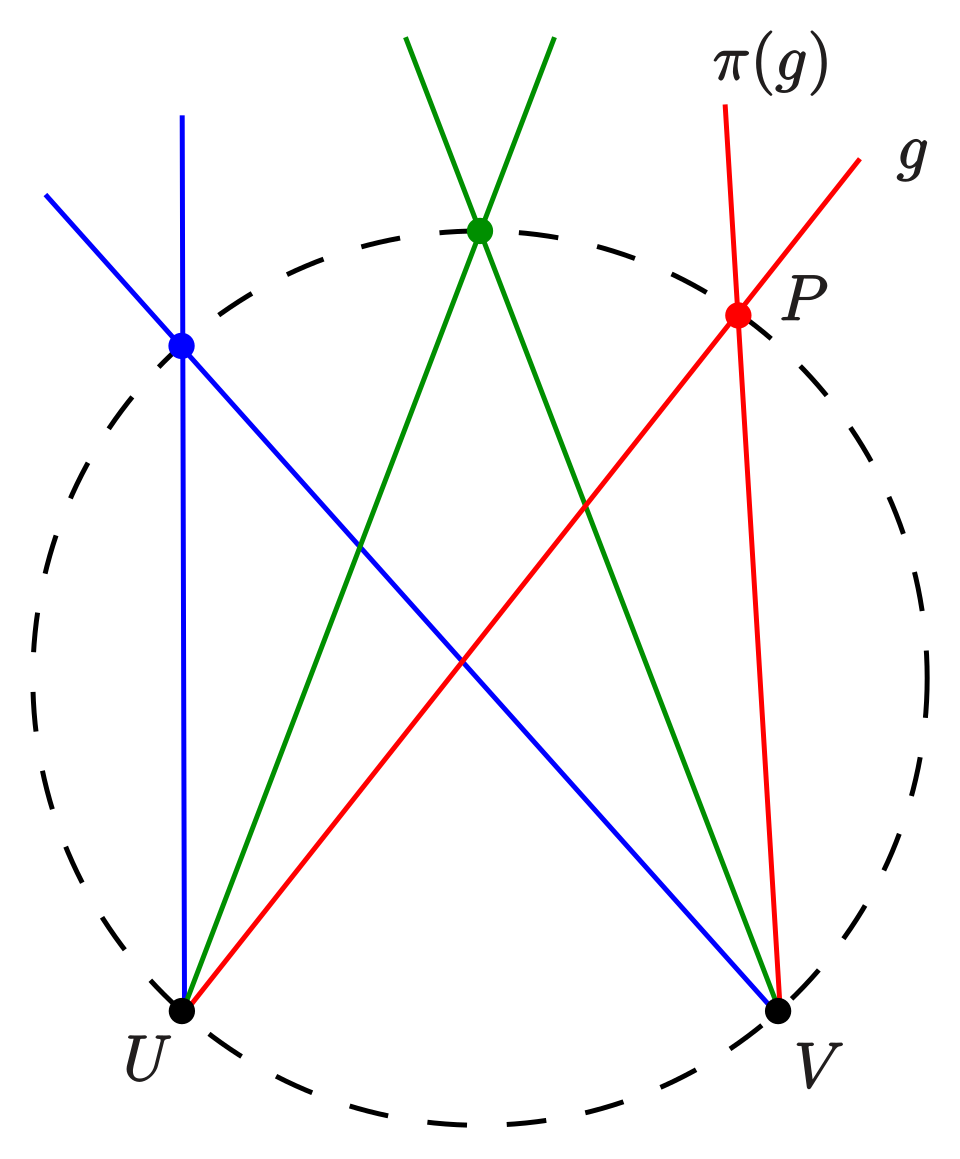
Une approche synthétique (sans coordonnées) pour définir les sections coniques dans un plan projectif a été proposée par Jakob Steiner en 1867.
- Étant donné deux faisceaux de droites en deux points (toutes les droites contenant respectivement et ) et une application projective , mais non perspective, de sur , alors les points d'intersection des droites correspondantes forment une conique projective non dégénérée.
Une application perspective d'un crayon sur un crayon est une bijection (correspondance 1-1) telle que les lignes correspondantes se croisent sur une ligne fixe , appelée axe de la perspective .
Une application projective est une séquence finie d'applications perspectives.
Comme une application projective dans un plan projectif sur un corps ( plan pappien ) est déterminée de manière unique par les images de trois droites , pour la génération de Steiner d'une conique, outre deux points, seules les images de trois droites doivent être données. Ces cinq éléments (deux points et trois droites) déterminent de manière unique la conique.
coniques de ligne
D'après le principe de dualité dans un plan projectif, le dual de chaque point est une droite, et le dual d'un lieu géométrique de points (un ensemble de points satisfaisant une certaine condition) est appelé enveloppe de droites. En utilisant la définition de Steiner d'une conique (ce lieu géométrique de points sera désormais appelé conique ponctuelle ) comme l'intersection des rayons correspondants de deux faisceaux liés, il est aisé de dualiser et d'obtenir l'enveloppe correspondante constituée des points correspondants de deux ensembles liés (points sur une droite) appartenant à des bases différentes (les droites sur lesquelles se trouvent ces points). Une telle enveloppe est appelée conique de droites (ou conique duale).
Dans le plan projectif réel, une conique ponctuelle possède la propriété que toute droite la rencontre en deux points (qui peuvent coïncider ou être complexes), et tout ensemble de points possédant cette propriété est une conique ponctuelle. Il s'ensuit dualement qu'une conique en ligne a deux de ses droites passant par chaque point, et que toute enveloppe de droites possédant cette propriété est une conique en ligne. À chaque point d'une conique ponctuelle admet une unique tangente, et dualement, sur chaque droite d'une conique en ligne admet un unique point appelé point de contact . Un théorème important établit que les tangentes à une conique ponctuelle forment une conique en ligne, et dualement, les points de contact d'une conique en ligne forment une conique ponctuelle.
Définition de Von Staudt
Karl Georg Christian von Staudt a défini une conique comme l'ensemble des points absolus d'une polarité possédant des points absolus. Von Staudt a introduit cette définition dans Geometrie der Lage (1847) dans le cadre de sa tentative d'éliminer toute notion métrique de la géométrie projective.
Une polarité π d'un plan projectif P est une bijection involutive entre les points et les droites de P qui préserve la relation d'incidence . Ainsi, une polarité associe un point Q à une droite q par π ( Q ) = q et π ( q ) = Q. Suivant Gergonne , q est appelé la polaire de Q et Q le pôle de q . Un point (ou une droite ) absolu ( e) d'une polarité est un point incident à sa polaire (son pôle).
Une conique de von Staudt dans le plan projectif réel est équivalente à une conique de Steiner .
Constructions
Il est impossible de construire un arc continu de conique à la règle et au compas. Cependant, il existe plusieurs constructions à la règle et au compas pour un nombre quelconque de points individuels sur un arc.
L'une de ces méthodes repose sur la réciproque du théorème de Pascal : si les points d'intersection des côtés opposés d'un hexagone sont alignés, alors les six sommets appartiennent à une conique. Plus précisément, étant donné cinq points A , B , C , D et E , et une droite passant par E , notée EG , on peut construire un point F appartenant à cette droite et à la conique définie par les cinq points. Soit AB le point d'intersection de DE en L , BC le point d'intersection de EG en M et CD le point d'intersection de LM en N. Alors AN rencontre EG au point F recherché . En modifiant la droite passant par E , on peut construire autant de points supplémentaires sur la conique que souhaité.

Une autre méthode, basée sur la construction de Steiner et utile dans les applications d'ingénierie, est la méthode du parallélogramme, où une conique est construite point par point en reliant certains points équidistants sur une ligne horizontale et une ligne verticale. Plus précisément, pour construire l'ellipse d'équation x 2/un 2+y 2/b 2 = 1 , commencez par construire le rectangle ABCD avec les sommets A ( a , 0 ), B ( a , 2 b ), C (− a , 2 b ) et D (− a , 0) . Divisez le côté BC en n segments égaux et utilisez la projection parallèle, par rapport à la diagonale AC , pour former des segments égaux sur le côté AB (les longueurs de ces segments seront b/unOn nomme les extrémités gauches des segments BC deA₁ à Aₙ , en partant de B et en allant vers C. Sur le côté BC, on nomme les extrémités supérieures D₁ à Dₙ, en partant de A et en allant vers B. Lespoints d' intersection AAᵢ ∩ DDᵢ , pour 1 ≤ i ≤ n , sont les points de l' ellipse comprise entre A et P ( 0 , b ) . Ce nom associe projectivement , mais non perspectivement, les droites du faisceau passantpar A à celles passant parD. La conique recherchée est obtenue par cette construction, car trois points ( A , D et P ) et deux tangentes (les droites verticales en A et D ) la déterminent de manière unique. Si l'on utilise un autre diamètre (et son diamètre conjugué) à la place des axes majeur et mineur de l'ellipse, on utilise un parallélogramme non rectangulaire, d'où le nom de la méthode. L'association des lignes des faisceaux peut être étendue pour obtenir d'autres points sur l'ellipse. Les constructions pour les hyperboles et les paraboles sont similaires.
Une autre méthode générale utilise la propriété de polarité pour construire l'enveloppe tangente d'une conique (une conique linéaire).
Dans la géométrie complexe
Dans le plan complexe C² , les ellipses et les hyperboles ne sont pas distinctes : on peut considérer une hyperbole comme une ellipse dont l’axe de longueur est imaginaire. Par exemple, l’ellipse devient une hyperbole par une rotation complexe, ce qui donne : . On obtient ainsi une classification binaire : ellipse/hyperbole et parabole. En prolongeant ces courbes dans le plan projectif complexe , on constate qu’elles coupent la droite à l’infini soit en deux points distincts (correspondant à deux asymptotes), soit en un point double (correspondant à l’axe de la parabole). L’hyperbole réelle est donc une image réelle plus suggestive de l’ellipse/hyperbole complexe, car elle possède également deux intersections (réelles) avec la droite à l’infini.
Une unification supplémentaire se produit dans le plan projectif complexe CP 2 : les coniques non dégénérées ne peuvent être distinguées les unes des autres, puisque n'importe laquelle peut être amenée à n'importe quelle autre par une transformation linéaire projective .
On peut démontrer que dans CP² , deux coniques ont quatre points communs (en tenant compte de la multiplicité ), soit entre 1 et 4 points d'intersection . Les possibilités d'intersection sont : quatre points distincts, deux points singuliers et un point double, deux points doubles, un point singulier et un point de multiplicité 3, ou un point de multiplicité 4. Si un point d'intersection a une multiplicité supérieure à 1, les deux courbes sont dites tangentes . S'il existe un point d'intersection de multiplicité au moins égale à 3, les deux courbes sont dites osculatrices . S'il n'existe qu'un seul point d'intersection, de multiplicité 4, les deux courbes sont dites superosculatrices .
De plus, chaque droite coupe chaque conique deux fois. Si le point d'intersection est double, la droite est tangente . Chaque conique, en coupant la droite à l'infini, possède deux points à l'infini. Si ces points sont réels, la courbe est une hyperbole ; s'ils sont des nombres imaginaires conjugués, c'est une ellipse ; s'il n'y a qu'un seul point double, c'est une parabole . Si les points à l'infini sont les points cycliques [1: i : 0] et [1: – i : 0] , la conique est un cercle . Si les coefficients d'une conique sont réels, les points à l'infini sont soit réels, soit des nombres complexes conjugués .
Cas dégénérés
La définition d'une conique comme cas dégénéré dépend de la définition employée et du cadre géométrique de la section conique. Certains auteurs définissent une conique comme une quadrique non dégénérée de dimension deux. Selon cette définition, il n'existe pas de coniques dégénérées (seulement des quadriques dégénérées), mais nous privilégierons la terminologie plus classique et éviterons cette définition.
Dans le plan euclidien, par définition géométrique, un cas dégénéré apparaît lorsque le plan de coupe passe par le sommet du cône. La conique dégénérée est soit : un point , lorsque le plan coupe le cône uniquement en son sommet ; une droite , lorsque le plan est tangent au cône (il contient exactement une génératrice du cône) ; soit une paire de droites sécantes (deux génératrices du cône). Ces cas correspondent respectivement aux formes limites d’une ellipse, d’une parabole et d’une hyperbole.
Si une conique du plan euclidien est définie par les zéros d'une équation du second degré (c'est-à-dire comme une quadrique), alors les coniques dégénérées sont : l' ensemble vide , un point, ou une paire de droites qui peuvent être parallèles, sécantes ou confondues. Le cas de l'ensemble vide peut correspondre soit à une paire de droites complexes conjuguées parallèles, comme dans l'équation (x, y) , soit à une ellipse imaginaire , comme dans l'équation (x, y). Une ellipse imaginaire ne satisfait pas la définition générale de la dégénérescence et n'est donc généralement pas considérée comme dégénérée. Le cas des deux droites se produit lorsque l'expression du second degré se factorise en deux facteurs linéaires, dont les zéros définissent une droite. Si les facteurs sont identiques, les droites correspondantes coïncident et on parle alors de droite double (une droite de multiplicité 2), ce qui correspond au cas précédent d'un plan tangent.
Dans le plan projectif réel, puisque les droites parallèles se coupent en un point de leur droite à l'infini, le cas des droites parallèles du plan euclidien peut être vu comme celui de droites sécantes. Cependant, comme le point d'intersection est le sommet du cône, ce dernier se réduit à un cylindre , c'est-à-dire dont le sommet est à l'infini. Les autres sections dans ce cas sont appelées sections cylindriques . Les sections cylindriques non dégénérées sont des ellipses (ou des cercles).
Dans le plan projectif complexe, les cas dégénérés d'une quadrique réelle (c'est-à-dire les équations du second degré à coefficients réels) peuvent tous être considérés comme une paire de droites, éventuellement confondues. L'ensemble vide correspond à la droite à l'infini, considérée comme une droite double ; un point (réel) est l'intersection de deux droites complexes conjuguées ; et les autres cas sont ceux mentionnés précédemment.
Pour distinguer les cas dégénérés des cas non dégénérés (y compris l'ensemble vide avec ces derniers) en utilisant la notation matricielle, soit β le déterminant de la matrice 3 × 3 de la section conique — c'est-à-dire, β = ( AC − B 2/4 ) F + LIT − CD 2 − AE 2/4Soit α = B 2 − 4 AC le discriminant. Alorsla conique est non dégénérée si et seulement si β ≠ 0. Si β = 0, on a un point lorsque α < 0 , deux droites parallèles (éventuellement confondues) lorsque α = 0 , ou deux droites sécantes lorsque α > 0.
Crayon de coniques
Une conique (non dégénérée) est entièrement déterminée par cinq points quelconques (non alignés ) d'un plan. L'ensemble des coniques passant par quatre points fixes (également situés dans un plan et non alignés) est appelé faisceau de coniques . Ces quatre points communs sont appelés les bases du faisceau. Par tout point autre qu'une base passe une conique unique du faisceau. Ce concept généralise celui de faisceau de cercles .
Intersection de deux coniques
Les solutions d'un système de deux équations du second degré à deux inconnues peuvent être vues comme les coordonnées des points d'intersection de deux coniques quelconques. Plus précisément, deux coniques peuvent avoir zéro, deux ou quatre points d'intersection, éventuellement confondus. Une méthode efficace pour localiser ces solutions exploite la représentation matricielle homogène des coniques , c'est-à-dire une matrice symétrique 3 × 3 qui dépend de six paramètres.
La procédure de localisation des points d'intersection suit ces étapes, où les coniques sont représentées par des matrices :
- Étant donné deux coniques et , considérons le faisceau de coniques donné par leur combinaison linéaire
- Identifier les paramètres homogènes correspondant à la conique dégénérée du faisceau. On peut y parvenir en imposant la condition et en résolvant pour et . Ces valeurs s'avèrent être les solutions d'une équation du troisième degré.
- Étant donné la conique dégénérée , identifiez les deux lignes, éventuellement coïncidentes, qui la constituent.
- croiser chaque ligne identifiée avec l'une ou l'autre des deux coniques originales.
- Les points d'intersection représenteront les solutions du système d'équations initial.
Généralisations
Les surfaces quadriques généralisent les sections coniques dans l'espace tridimensionnel, notamment les ellipsoïdes, les paraboloïdes et les hyperboloïdes.
Les coniques peuvent être définies sur d'autres corps (c'est-à-dire dans d'autres géométries pappiennes ). Cependant, il convient d'être prudent lorsque le corps est de caractéristique 2, car certaines formules ne sont plus applicables. Par exemple, les représentations matricielles utilisées précédemment nécessitent une division par 2.
Une généralisation d'une conique non dégénérée dans un plan projectif est un ovale . Un ovale est un ensemble de points qui possède les propriétés suivantes, qui sont celles des coniques : 1) toute droite intersecte un ovale en zéro, un ou deux points, 2) en tout point de l'ovale il existe une unique tangente.
La généralisation des propriétés de foyer des coniques au cas où il y a plus de deux foyers produit des ensembles appelés coniques généralisées .
L'intersection d'un cône elliptique avec une sphère est une conique sphérique , qui partage de nombreuses propriétés avec les coniques planes.
Dans d'autres domaines des mathématiques
La classification en fonctions elliptiques, paraboliques et hyperboliques est très répandue en mathématiques et divise souvent un domaine en sous-domaines bien distincts. Cette classification résulte généralement de la présence d'une forme quadratique (à deux variables, cela correspond au discriminant associé ), mais peut aussi correspondre à une excentricité.
Classification des formes quadratiques :
- Formes quadratiques
- Les formes quadratiques à coefficients réels sont classées selon la loi d'inertie de Sylvester , c'est-à-dire selon leur indice positif, leur indice nul et leur indice négatif : une forme quadratique à deux variables peut être transformée en une forme diagonale , où le nombre de coefficients +1 est l'indice positif, le nombre de coefficients −1 est l'indice négatif, et les variables restantes constituent l'indice nul . Ainsi, à deux variables, les formes quadratiques non nulles sont classées comme suit :
- En deux variables, les formes quadratiques sont classées selon leur discriminant, de façon analogue aux coniques. Cependant, en dimensions supérieures, la classification la plus utile est celle des formes définies (toutes positives ou toutes négatives), dégénérées (présence de zéros) ou indéfinies (mélange de valeurs positives et négatives, mais aucune valeur nulle). Cette classification sous-tend de nombreuses autres.
- Courbure
- La courbure gaussienne d'une surface décrit sa géométrie infinitésimale et peut être positive en tout point ( géométrie elliptique) , nulle ( géométrie euclidienne , plane, parabolique) ou négative ( géométrie hyperbolique ). À l'échelle infinitésimale, au second ordre, la surface ressemble au graphe de (ou 0), ou . En effet, d'après le théorème d'uniformisation, toute surface peut être considérée comme globalement (en tout point) positivement courbée, plane ou négativement courbée. En dimensions supérieures, le tenseur de courbure de Riemann est plus complexe, mais les variétés à courbure sectionnelle constante sont des objets d'étude intéressants et présentent des propriétés remarquablement différentes, comme expliqué à l'article sur la courbure sectionnelle .
- EDP du second ordre
- Les équations aux dérivées partielles (EDP) du second ordre sont classées en trois catégories : elliptiques, paraboliques ou hyperboliques, selon que leurs termes du second ordre correspondent à une forme quadratique elliptique, parabolique ou hyperbolique. Le comportement et la théorie de ces différents types d’EDP sont remarquablement différents ; par exemple, l’ équation de Poisson est elliptique, l’ équation de la chaleur est parabolique et l’ équation des ondes est hyperbolique.
Les classifications de l'excentricité comprennent :
- transformations de Möbius
- Les transformations de Möbius réelles (éléments de PSL 2 ( R ) ou de son revêtement 2 fois, SL 2 ( R ) ) sont classées comme elliptiques, paraboliques ou hyperboliques selon que leur demi-trace est ou en miroir de la classification par excentricité.
- Rapport variance/moyenne
- Le rapport variance/moyenne permet de classer plusieurs familles importantes de distributions de probabilité discrètes : la distribution constante est circulaire (excentricité nulle), les distributions binomiales sont elliptiques, les distributions de Poisson sont paraboliques et les distributions binomiales négatives sont hyperboliques. Ce point est développé à l’aide des cumulants de certaines distributions de probabilité discrètes .
