L'automatisation comprend l'utilisation de divers équipements et systèmes de contrôle tels que des machines , des procédés industriels , des chaudières et des fours de traitement thermique , la mise en service de réseaux téléphoniques , le pilotage , la stabilisation de navires , d'aéronefs et d'autres applications et véhicules nécessitant une intervention humaine réduite. Les exemples vont d'un thermostat domestique contrôlant une chaudière à un grand système de contrôle industriel avec des dizaines de milliers de mesures d'entrée et de signaux de contrôle de sortie.
Dans le type le plus simple de boucle de régulation automatique , un contrôleur compare une valeur mesurée d'un processus à une valeur de consigne et traite le signal d'erreur résultant pour modifier une entrée du processus, de sorte que celui-ci reste à sa valeur de consigne malgré les perturbations. Cette régulation en boucle fermée est une application de la rétroaction négative à un système. Les fondements mathématiques de la théorie du contrôle remontent au XVIIIe siècle et ont connu un développement rapide au XXe siècle. Le terme « automatisation » , inspiré du mot « automatique » (dérivé d' « automate » ), n'était pas d'usage courant avant 1947, date à laquelle Ford a créé un département d'automatisation. C'est à cette époque que l'industrie a rapidement adopté les régulateurs à rétroaction . Les avancées technologiques des années 1930 ont profondément révolutionné divers secteurs industriels.
Le Rapport sur le développement dans le monde 2019 de la Banque mondiale démontre que les nouvelles industries et les emplois créés dans le secteur technologique compensent les conséquences économiques des pertes d'emplois dues à l'automatisation. Les pertes d'emplois et la mobilité sociale descendante imputées à l'automatisation sont citées parmi les nombreux facteurs expliquant la résurgence des politiques nationalistes , protectionnistes et populistes aux États-Unis, au Royaume-Uni et en France, entre autres pays, depuis les années 2010.
Entre 300 av. J.-C. et 1200 apr. J.-C. environ, la mesure précise du temps était une préoccupation majeure pour les Grecs et les Arabes. En Égypte ptolémaïque , vers 270 av. J.-C., Ctésibios décrivit un régulateur à flotteur pour horloge à eau , un dispositif similaire au mécanisme à bille et à robinet des toilettes modernes. Il s'agissait du premier mécanisme à rétroaction connu. L'apparition de l'horloge mécanique au XIVe siècle rendit obsolète l'horloge à eau et son système de régulation par rétroaction.
Les frères persans Banu Mūsā , dans leur ouvrage intitulé « Le Livre des dispositifs ingénieux » (850 apr. J.-C.), décrivent plusieurs systèmes de commande automatique. Ils développent notamment des commandes de niveau à deux étapes pour les fluides, une forme de commande à structure variable discontinue. Ils décrivent également un contrôleur à rétroaction . Jusqu'à la révolution industrielle, la conception des systèmes de commande à rétroaction reposait sur une approche empirique, combinée à une grande intuition technique. Ce n'est qu'au milieu du XIXe siècle que la stabilité de ces systèmes est analysée mathématiquement, grâce au langage formel de la théorie de la commande automatique.
Le régulateur centrifuge a été inventé par Christiaan Huygens au XVIIe siècle et utilisé pour ajuster l'écart entre les meules .
Révolution industrielle en Europe occidentale
L'introduction des moteurs principaux , ou machines automotrices, a perfectionné les moulins à grains, les fourneaux, les chaudières et la machine à vapeur, engendrant un nouveau besoin en systèmes de contrôle automatique, notamment les régulateurs de température (inventés en 1624 ; voir Cornelius Drebbel ), les régulateurs de pression (1681), de contrôle de vitesse . Un autre mécanisme de contrôle servait à orienter les ailes des moulins à vent. Il fut breveté par Edmund Lee en 1745. Toujours en 1745, Jacques de Vaucanson inventa le premier métier à tisser automatisé. Vers 1800, Joseph Marie Jacquard créa un système de cartes perforées pour programmer les métiers à tisser.
En 1771, Richard Arkwright inventa le premier moulin à filer entièrement automatisé actionné par l'énergie hydraulique, connu à l'époque sous le nom de « water frame » . Un moulin à farine automatique fut mis au point par Oliver Evans en 1785, constituant ainsi le premier processus industriel entièrement automatisé

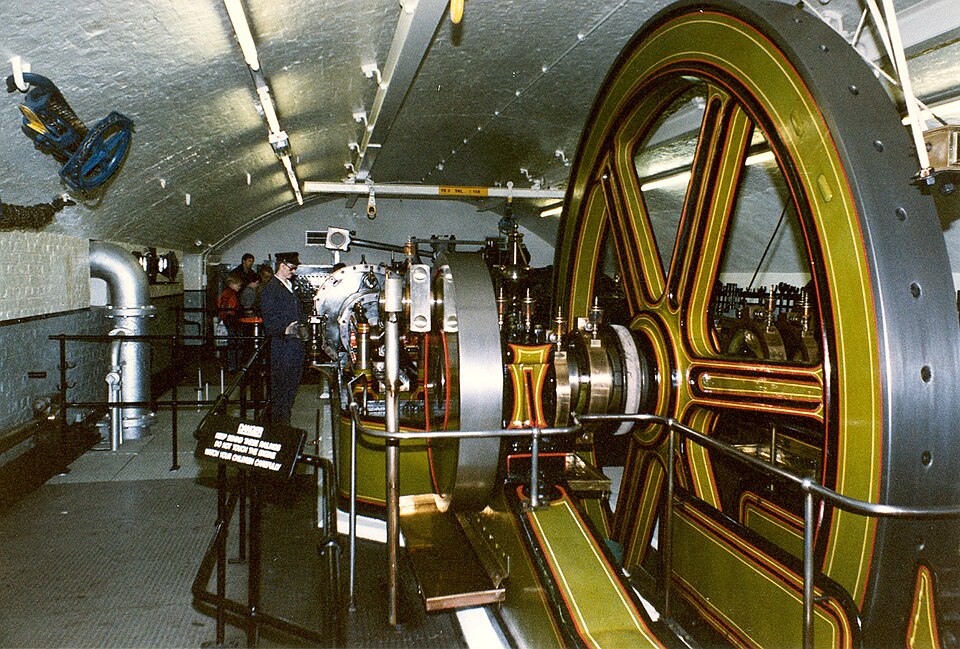
En 1784, M. Bunce, en Angleterre, utilisa un régulateur centrifuge dans le cadre d'une maquette de grue à vapeur . James Watt adopta ce régulateur pour une machine à vapeur en 1788, après que son associé, Boulton, en eut aperçu un dans un moulin à farine que Boulton et Watt étaient en train de construire. Ce régulateur ne pouvait maintenir une vitesse constante ; la machine adoptait une nouvelle vitesse constante en fonction des variations de charge. Il était toutefois capable de gérer de faibles variations, comme celles dues aux fluctuations de la charge thermique de la chaudière. De plus, une oscillation se produisait lors de chaque changement de vitesse. Par conséquent, les machines équipées de ce régulateur n'étaient pas adaptées aux opérations nécessitant une vitesse constante, telles que le filage du coton.
Plusieurs améliorations apportées au régulateur, ainsi qu'à la synchronisation de la coupure des soupapes de la machine à vapeur, ont permis de rendre cette dernière adaptée à la plupart des applications industrielles avant la fin du XIXe siècle. Les progrès réalisés dans le domaine de la machine à vapeur ont largement devancé les avancées scientifiques, tant en thermodynamique qu'en théorie du contrôle. Le régulateur a suscité relativement peu d'intérêt scientifique jusqu'à la publication d'un article de James Clerk Maxwell qui a posé les bases théoriques de la compréhension de la théorie du contrôle.
XXe siècle
La logique à relais a été introduite avec l'électrification des usines , qui a connu une adoption rapide entre 1900 et les années 1920. Les centrales électriques connaissaient également une croissance rapide et l'exploitation de nouvelles chaudières à haute pression, de turbines à vapeur et de sous-stations électriques a engendré une forte demande en instruments et systèmes de contrôle. Les salles de contrôle centralisées se sont généralisées dans les années 1920, mais jusqu'au début des années 1930, la plupart des commandes de processus étaient de type marche/arrêt. Les opérateurs surveillaient généralement des graphiques tracés par des enregistreurs qui représentaient les données des instruments. Pour effectuer des corrections, ils ouvraient ou fermaient manuellement des vannes ou actionnaient des interrupteurs. Les salles de contrôle utilisaient également des voyants de couleur pour signaler aux ouvriers de l'usine qu'ils devaient effectuer manuellement certaines modifications.
Le développement de l'amplificateur électronique dans les années 1920, essentiel pour la téléphonie longue distance, exigeait un rapport signal/bruit plus élevé, problème résolu par l'annulation du bruit par rétroaction négative. Cette application, parmi d'autres, a contribué à la théorie du contrôle. Dans les années 1940 et 1950, la mathématicienne allemande Irmgard Flügge-Lotz a développé la théorie des commandes automatiques discontinues, qui a trouvé des applications militaires pendant la Seconde Guerre mondiale, notamment dans les systèmes de conduite de tir et de navigation aérienne .
Les contrôleurs, capables d'effectuer des modifications calculées en réponse à des écarts par rapport à un point de consigne plutôt qu'à une commande marche/arrêt, ont commencé à être introduits dans les années 1930. Les contrôleurs ont permis à la fabrication de continuer à afficher des gains de productivité pour compenser l'influence décroissante de l'électrification des usines.
L’électrification des années 1920 a considérablement accru la productivité des usines. Aux États-Unis, la croissance de la productivité manufacturière est passée de 5,2 %/an entre 1919 et 1929 à 2,76 %/an entre 1929 et 1941. Alexander Field note que les dépenses en instruments non médicaux ont augmenté de manière significative entre 1929 et 1933 et sont restées importantes par la suite.
Les Première et Seconde Guerres mondiales ont été marquées par des avancées majeures dans le domaine des communications de masse et du traitement du signal . Parmi les autres avancées clés en matière de commandes automatiques, on peut citer les équations différentielles , la théorie de la stabilité et la théorie des systèmes (1938), l'analyse fréquentielle (1940), le contrôle des navires (1950) et l'analyse stochastique (1941).
À partir de 1958, divers systèmes basés sur des modules logiques numériques à semi-conducteurs pour automates programmables câblés (précurseurs des automates programmables industriels [API]) ont émergé pour remplacer la logique à relais électromécanique dans les systèmes de contrôle industriels pour la régulation et l'automatisation des processus , notamment les premiers systèmes Telefunken / AEG Siemens Simatic , Philips / Mullard / Norbit , BBC ACEC Logacec , Texaco à Port Arthur est devenue la première usine chimique à utiliser le contrôle numérique . La conversion des usines au contrôle numérique a commencé à se répandre rapidement dans les années 1970 à mesure que le prix du matériel informatique baissait.
Applications importantes
Le standard téléphonique automatique a été introduit en 1892, en même temps que les téléphones à cadran. En 1929, 31,9 % du réseau Bell était automatisé. La commutation téléphonique automatique utilisait initialement des amplificateurs à tubes électroniques et des commutateurs électromécaniques, qui consommaient une grande quantité d'électricité. Le volume d'appels a fini par croître si rapidement que l'on craignait que le réseau téléphonique n'absorbe toute la production d'électricité, ce qui a incité les laboratoires Bell à entreprendre des recherches sur le transistor .
La logique des relais de commutation téléphonique a inspiré l'ordinateur numérique. La première machine à souffler le verre commercialisée avec succès était un modèle automatique introduit en 1905 Actionnée par une équipe de deux hommes travaillant par roulement de 12 heures, cette machine pouvait produire 17 280 bouteilles en 24 heures, contre 2 880 bouteilles fabriquées en une journée par une équipe de six hommes et garçons travaillant en atelier. Le coût de fabrication des bouteilles à la machine était de 10 à 12 cents la grosse, contre 1,80 $ la grosse pour les souffleurs de verre manuels et leurs aides.
Les entraînements électriques sectionnels ont été développés à l'aide de la théorie du contrôle. Ils sont utilisés sur différentes sections d'une machine où un différentiel précis doit être maintenu entre elles. Dans le laminage de l'acier, le métal s'allonge en passant entre des paires de rouleaux dont la vitesse de rotation augmente progressivement. Dans la fabrication du papier, la feuille se rétracte en passant autour de séchoirs chauffés à la vapeur, disposés en groupes et dont la vitesse de rotation diminue progressivement. La première application d'un entraînement électrique sectionnel remonte à 1919 sur une machine à papier L'une des avancées les plus importantes de l'industrie sidérurgique du XXe siècle a été le laminage continu de larges bandes, mis au point par Armco en 1928

Avant l’automatisation, de nombreux produits chimiques étaient fabriqués par lots. En 1930, avec l’utilisation généralisée des instruments et l’émergence des contrôleurs, le fondateur de Dow Chemical Co. préconisait la production en continu .
Dans les années 1840, James Nasmyth a mis au point des machines-outils autonomes qui s'affranchissaient de la dextérité manuelle et pouvaient donc être utilisées par des garçons et des ouvriers non qualifiés. Dans les années 1950 , les machines-outils ont été automatisées grâce à la commande numérique (CN) utilisant des bandes de papier perforées. Cette technologie a rapidement évolué vers la commande numérique par ordinateur (CNC).
Aujourd'hui, l'automatisation est largement répandue dans presque tous les procédés de fabrication et d'assemblage. Parmi les plus importants, on peut citer la production d'électricité, le raffinage du pétrole, la chimie, la sidérurgie, la plasturgie, la cimenterie, les usines d'engrais, les papeteries, l'assemblage automobile et de camions, la production aéronautique, la verrerie, les usines de séparation du gaz naturel, l'agroalimentaire, la mise en conserve et en bouteille, ainsi que la fabrication de pièces détachées. Les robots sont particulièrement utiles dans les applications à risque, comme la peinture automobile. Ils servent également à l'assemblage des cartes de circuits imprimés. Le soudage automobile est réalisé par des robots, et des soudeuses automatiques sont utilisées dans la construction de pipelines.
Ère spatiale/informatique
Avec l'avènement de l'ère spatiale en 1957, la conception des systèmes de contrôle, notamment aux États-Unis, s'est détournée des techniques fréquentielles de la théorie classique du contrôle pour revenir aux techniques d'équations différentielles de la fin du XIXe siècle, formulées dans le domaine temporel. Dans les années 1940 et 1950, la mathématicienne allemande Irmgard Flügge-Lotz a développé la théorie du contrôle automatique discontinu, largement utilisée dans les systèmes de contrôle à hystérésis tels que les systèmes de navigation , les systèmes de conduite de tir et l'électronique . Grâce à Flügge-Lotz et à d'autres chercheurs, l'ère moderne a vu l'avènement de la conception temporelle pour les systèmes non linéaires (1961), la navigation (1960), la théorie du contrôle optimal et de l'estimation (1962), la théorie du contrôle non linéaire (1969), la théorie du contrôle numérique et du filtrage (1974), et l' ordinateur personnel (1983).
Avantages, inconvénients et limitations
L'un des avantages les plus souvent cités de l'automatisation industrielle est l'accélération de la production et la réduction des coûts de main-d'œuvre. Elle permet également de remplacer les tâches pénibles, physiques ou répétitives. De plus, les machines peuvent effectuer des tâches en environnements dangereux ou hors de portée humaine, car elles peuvent fonctionner même à des températures extrêmes ou dans des atmosphères radioactives ou toxiques. Leur maintenance peut également être assurée par des contrôles qualité simples. Cependant, à l'heure actuelle, toutes les tâches ne peuvent pas être automatisées, et l'automatisation de certaines tâches est plus coûteuse que celle d'autres. Les coûts initiaux d'installation des machines en usine sont élevés, et un défaut de maintenance peut entraîner la perte du produit lui-même.
De plus, certaines études semblent indiquer que l'automatisation industrielle pourrait avoir des effets néfastes au-delà des préoccupations opérationnelles, notamment le déplacement des travailleurs en raison de la perte systémique d'emplois et des dommages environnementaux cumulatifs ; cependant, ces résultats sont à la fois complexes et controversés, et pourraient potentiellement être contournés.
Les principaux avantages de l'automatisation sont :
- Augmentation du débit ou de la productivité
- Qualité améliorée
- Prévisibilité accrue
- Amélioration de la robustesse (cohérence) des processus ou du produit
- Amélioration de la cohérence de la production
- Réduction des coûts et dépenses directs liés à la main-d'œuvre humaine
- Temps de cycle réduit
- Précision accrue
- Soulager les humains des tâches répétitives et monotones
- Travail requis en matière de développement, de déploiement, de maintenance et d'exploitation des processus automatisés — souvent structuré sous forme de « tâches »
- Une plus grande liberté humaine de faire d'autres choses
L’automatisation désigne principalement le remplacement de l’action humaine par des machines, mais elle est aussi, de manière plus générale, associée à la mécanisation, c’est-à-dire le remplacement du travail humain par des machines. Couplée à la mécanisation, elle étend les capacités humaines en termes de taille, de force, de vitesse, d’endurance, de portée et d’acuité visuelles, de fréquence et de précision auditives, de détection et d’action électromagnétiques, etc. Ses avantages sont les suivants :
- Soulager les humains des contraintes professionnelles dangereuses et des blessures au travail (par exemple, moins de maux de dos dus au port de charges lourdes).
- Éloigner les humains des environnements dangereux (par exemple, les incendies, l'espace, les volcans, les installations nucléaires, les milieux sous-marins, etc.).
Les principaux inconvénients de l'automatisation sont :
- Coût initial élevé
- Une production plus rapide sans intervention humaine peut entraîner une production plus rapide et incontrôlée de défauts là où les processus automatisés sont défectueux.
- L’augmentation des capacités peut entraîner une augmentation des problèmes en cas de défaillance des systèmes — libérant des toxines, des forces, des énergies, etc. dangereuses, à des rythmes accrus.
- Les initiateurs de l'automatisation comprennent souvent mal la capacité d'adaptation humaine. Il est souvent difficile d'anticiper toutes les situations et de développer des réponses automatisées entièrement préétablies pour chaque cas. Les découvertes inhérentes à l'automatisation des processus peuvent nécessiter des itérations imprévues pour être résolues, entraînant des coûts et des retards inattendus.
- Les personnes qui comptent sur un revenu d'emploi pourraient être gravement perturbées par le déploiement de l'automatisation par d'autres, là où aucun revenu similaire n'est facilement disponible.
Paradoxe de l'automatisation
Le paradoxe de l'automatisation souligne que plus un système automatisé est efficace, plus la contribution humaine des opérateurs est cruciale. Les humains sont moins impliqués, mais leur rôle devient plus critique. Lisanne Bainbridge , psychologue cognitive, a notamment mis en lumière ces problématiques dans son article largement cité intitulé « Les ironies de l'automatisation » Si un système automatisé commet une erreur, celle-ci s'amplifie jusqu'à sa correction ou son arrêt. C'est là que les opérateurs humains interviennent . L'accident du vol 447 d'Air France en est un exemple tragique : une défaillance de l'automatisation a contraint les pilotes à prendre les commandes manuellement, une situation à laquelle ils n'étaient pas préparés
Limites
limitations actuelles
Entre 2025 et 2026, le déploiement concret de la robotique avancée a révélé des limitations critiques au niveau des infrastructures, telles que l’autonomie des batteries (généralement de 2 à 4 heures par charge) et la nécessité d’un réseau Wi-Fi à haut débit et de revêtements de sol spécifiques pour un fonctionnement fiable. De plus, les robots continuent de rencontrer des difficultés face à des obstacles imprévisibles d’origine humaine, ce qui requiert toujours une intervention humaine pour maintenir le flux opérationnel.
Impact sociétal et chômage
L’inquiétude relative suscitée par l’automatisation, telle que reflétée dans les sondages d’opinion, semble étroitement corrélée à la force du mouvement syndical dans la région ou le pays concerné. Par exemple, alors qu’une étude du Pew Research Center indique que 72 % des Américains s’inquiètent de l’automatisation croissante sur le lieu de travail, 80 % des Suédois considèrent l’automatisation et l’intelligence artificielle (IA) comme un progrès, grâce à la puissance persistante des syndicats et à un système de protection sociale national plus robuste .
Selon une estimation, 47 % des emplois actuels aux États-Unis pourraient être entièrement automatisés d'ici 2033. De plus, les salaires et le niveau d'études semblent être fortement corrélés négativement avec le risque d'automatisation d'une profession. Erik Brynjolfsson et Andrew McAfee affirment qu'« il n'y a jamais eu de meilleur moment pour être un travailleur possédant des compétences particulières ou une formation adéquate, car ces personnes peuvent utiliser la technologie pour créer et capter de la valeur. En revanche, il n'y a jamais eu de pire moment pour être un travailleur ne possédant que des compétences et des aptitudes "ordinaires", car les ordinateurs, les robots et autres technologies numériques acquièrent ces compétences et aptitudes à un rythme extraordinaire. » D'autres, cependant, soutiennent que les professions hautement qualifiées, comme celles d' avocat , de médecin , d'ingénieur ou de journaliste, sont également menacées par l'automatisation.
D’après une étude de 2020 publiée dans le Journal of Political Economy , l’automatisation a des effets négatifs importants sur l’emploi et les salaires : « Un robot supplémentaire pour mille travailleurs réduit le taux d’emploi de 0,2 point de pourcentage et les salaires de 0,42 %. » Une étude de 2025 parue dans l’ American Economic Journal a constaté que l’introduction de robots industriels avait entraîné une baisse de l’emploi des hommes et des femmes de respectivement 3,7 et 1,6 points de pourcentage en 1993 et 2014.
Une étude de Carl Benedikt Frey et Michael Osborne, de l' école Oxford Martin, a démontré que les employés effectuant des tâches suivant des procédures bien définies et facilement automatisables par des algorithmes sophistiqués risquent d'être déplacés, et que 47 % des emplois aux États-Unis seraient menacés. Cette étude, initialement publiée sous forme de document de travail en 2013 puis parue en 2017, prévoyait que l'automatisation serait la plus préoccupante pour les emplois physiques peu rémunérés, d'après un sondage mené auprès d'un groupe de collègues. Cependant, selon une étude publiée dans McKinsey Quarterly en 2015, l'impact de l'informatisation ne se traduit généralement pas par le remplacement des employés, mais par l'automatisation d'une partie de leurs tâches. La méthodologie de l'étude McKinsey a été fortement critiquée pour son manque de transparence et son recours à des évaluations subjectives. La méthodologie de Frey et Osborne a également été critiquée pour son manque de données probantes, de perspective historique et de crédibilité. De plus, l’Organisation de coopération et de développement économiques ( OCDE ) a constaté que dans les 21 pays membres de l’OCDE, 9 % des emplois sont automatisables.
D'après une formule de Gilles Saint-Paul , économiste à l'Université Toulouse 1 , la demande de main-d'œuvre non qualifiée diminue moins vite que la demande de main-d'œuvre qualifiée n'augmente . À long terme, et pour la société dans son ensemble, cela a entraîné une baisse des prix des produits, une réduction du temps de travail moyen et l'émergence de nouveaux secteurs (robots, informatique, design, etc.). Ces nouveaux secteurs créent de nombreux emplois hautement qualifiés et bien rémunérés. D'ici 2030, entre 3 et 14 % de la population active mondiale sera contrainte de changer de catégorie professionnelle en raison de l'automatisation qui supprime des emplois dans des secteurs entiers. Si le nombre d'emplois perdus à cause de l'automatisation est souvent compensé par les créations d'emplois liées aux progrès technologiques, les emplois remplacés ne sont pas de même nature et contribuent à la hausse du chômage dans les classes moyennes inférieures. Ce phénomène est particulièrement marqué aux États-Unis et dans les pays développés, où les progrès technologiques stimulent la demande de main-d'œuvre hautement qualifiée, tandis que la demande de main-d'œuvre à salaire moyen continue de diminuer. Les économistes appellent cette tendance « polarisation des revenus », où les salaires des travailleurs non qualifiés sont tirés vers le bas et ceux des travailleurs qualifiés vers le haut, et elle devrait se poursuivre dans les économies développées.
Fabrication en obscurité
L'automatisation des maisons et des appareils électroménagers est également considérée comme ayant un impact sur l'environnement. Une étude finlandaise sur la consommation énergétique des maisons automatisées a montré que ces dernières pouvaient réduire leur consommation en surveillant les niveaux de consommation dans différentes zones et en les ajustant afin de limiter les pertes d'énergie (par exemple, en réduisant automatiquement la consommation la nuit, lorsque l'activité est faible). Cette étude, parmi d'autres, a indiqué que la capacité des maisons intelligentes à surveiller et à ajuster les niveaux de consommation permettrait de réduire le gaspillage d'énergie. Cependant, certaines recherches suggèrent que les maisons intelligentes pourraient ne pas être aussi efficaces que les maisons non automatisées. Une étude plus récente a montré que, si la surveillance et l'ajustement des niveaux de consommation diminuent effectivement le gaspillage d'énergie, ce processus nécessite des systèmes de surveillance qui consomment eux-mêmes de l'énergie. L'énergie requise pour faire fonctionner ces systèmes annule parfois leurs avantages, ce qui se traduit par un bénéfice écologique faible, voire nul.
Convertibilité et délai de traitement
L'électronique numérique a également joué un rôle déterminant. Les anciens instruments analogiques ont été remplacés par leurs équivalents numériques, plus précis et plus flexibles, offrant un champ d'application plus vaste pour des configurations , des paramétrages et des opérations plus sophistiqués. Cette évolution s'est accompagnée de la révolution des bus de terrain, qui a permis une communication en réseau (via un seul câble) entre les systèmes de contrôle et les instruments de terrain, éliminant ainsi le câblage traditionnel.
Les usines de fabrication discrète ont rapidement adopté ces technologies. Les industries de procédés, plus conservatrices et caractérisées par des cycles de vie des installations plus longs, ont été plus lentes à les adopter et les systèmes de mesure et de contrôle analogiques restent prédominants. L'utilisation croissante de l'Ethernet industriel dans les usines accentue encore ces tendances, permettant une intégration plus étroite des sites de production au sein de l'entreprise, via Internet si nécessaire. La concurrence mondiale a également accru la demande de systèmes de fabrication reconfigurables .
Outils d'automatisation
Les ingénieurs peuvent désormais contrôler numériquement les dispositifs automatisés. Il en résulte une expansion rapide du nombre d'applications et d'activités humaines. Les technologies de conception assistée par ordinateur (ou CAx) constituent aujourd'hui le fondement des outils mathématiques et organisationnels utilisés pour créer des systèmes complexes. Parmi les exemples notables de CAx, on peut citer la conception assistée par ordinateur (logiciels de CAO) et la fabrication assistée par ordinateur (logiciels de FAO). L'amélioration de la conception, de l'analyse et de la fabrication des produits permise par les CAx a été bénéfique pour l'industrie.
Les technologies de l'information , associées aux machines et procédés industriels , peuvent faciliter la conception, la mise en œuvre et la surveillance des systèmes de contrôle. Un exemple de système de contrôle industriel est l' automate programmable (PLC). Les PLC sont des ordinateurs spécialisés et durcis, fréquemment utilisés pour synchroniser le flux d'entrées provenant de capteurs (physiques) et d'événements avec le flux de sorties vers les actionneurs et autres événements.
Les interfaces homme-machine (IHM) ou interfaces homme-ordinateur (IHO), anciennement appelées interfaces homme-machine , sont généralement utilisées pour communiquer avec les automates programmables et autres ordinateurs. Le personnel de maintenance qui assure la surveillance et le contrôle via les IHM peut porter différents noms. Dans les environnements industriels et de production, on les appelle opérateurs ou un terme similaire. Dans les chaufferies et les services techniques centraux, on les appelle techniciens de maintenance .
Il existe différents types d'outils d'automatisation :
- Réseau de neurones artificiels (RNA)
- DCS – Système de contrôle distribué
- IHM – Interface homme-machine
- RPA – Automatisation robotisée des processus
- SCADA – Supervision, contrôle et acquisition de données
- PLC – Automate programmable
- Instrumentation
- Contrôle du mouvement
- Robotique
Le logiciel de simulation hôte (HSS) est un outil de test couramment utilisé pour tester le logiciel de l'équipement. Le HSS est utilisé pour tester les performances de l'équipement en ce qui concerne les normes d'automatisation d'usine (délai d'attente, temps de réponse, temps de traitement).
Automatisation cognitive
L’automatisation cognitive, sous-ensemble de l’IA, est un genre émergent d’automatisation rendu possible par l’informatique cognitive . Son principal objectif est l’automatisation des tâches administratives et des flux de travail consistant à structurer des données non structurées . L’automatisation cognitive s’appuie sur de multiples disciplines : le traitement automatique du langage naturel , l’informatique en temps réel , les algorithmes d’apprentissage automatique , l’analyse des mégadonnées et l’apprentissage fondé sur des preuves .
Selon Deloitte , l’automatisation cognitive permet de reproduire les tâches et le jugement humains « à une vitesse rapide et à une échelle considérable » . Ces tâches comprennent :
- Rédaction de documents
- Extraction de données et synthèse/rapport de documents
- Gestion des contrats
- Recherche en langage naturel
- Intégration des clients, des employés et des parties prenantes
- Activités manuelles et vérifications
- Suivi et communications par courriel
Applications récentes et émergentes
Production d'énergie automatisée
Des technologies comme les panneaux solaires , les éoliennes et autres sources d'énergie renouvelables , associées aux réseaux intelligents , aux micro-réseaux et au stockage par batteries , peuvent automatiser la production d'électricité.
production agricole
L'évolution technologique en agriculture a entraîné une transition progressive vers les équipements numériques et la robotique. La mécanisation motorisée, utilisant la force motrice du moteur, automatise les opérations agricoles telles que le labour et la traite. Grâce aux technologies d'automatisation numérique, il devient également possible d'automatiser le diagnostic et la prise de décision pour les opérations agricoles. Par exemple, des robots agricoles autonomes peuvent récolter et semer les cultures, tandis que des drones peuvent collecter des informations pour contribuer à l'automatisation de l'application des intrants. L'agriculture de précision utilise fréquemment ces technologies d'automatisation .
La mécanisation motorisée a généralement progressé ces dernières années. L’Afrique subsaharienne est la seule région où l’adoption de la mécanisation motorisée a stagné au cours des dernières décennies.
Les technologies d'automatisation sont de plus en plus utilisées dans l'élevage, bien que les données relatives à leur adoption soient limitées. Cette adoption est probablement plus fréquente en Europe du Nord et quasi inexistante dans les pays à revenu faible et intermédiaire . Des distributeurs automatiques d'aliments pour les bovins et la volaille existent également, mais les données concernant les tendances et les facteurs d'adoption sont tout aussi rares
Vente au détail

Le commerce en ligne peut être considéré comme une forme de vente au détail automatisée, le paiement et la validation de la commande s'effectuant via un système de traitement automatisé des transactions en ligne. La part du commerce de détail en ligne dans le total des ventes est passée de 5,1 % en 2011 à 8,3 % en 2016. Or, deux tiers des livres, de la musique et des films sont désormais achetés en ligne. De plus, l'automatisation et le commerce en ligne pourraient réduire la demande en centres commerciaux et en surfaces commerciales, qui, aux États-Unis, représenteraient actuellement environ 31 % de l'ensemble des surfaces commerciales, soit environ Amazon a largement contribué à la croissance du commerce en ligne ces dernières années, représentant la moitié de la croissance du secteur en 2016. D'autres formes d'automatisation peuvent également faire partie intégrante du commerce en ligne, par exemple le déploiement de systèmes robotisés automatisés dans les entrepôts, tels que ceux utilisés par Amazon avec Kiva Systems .
Nourriture et boissons
Le secteur de la restauration rapide a commencé à automatiser le processus de commande ; McDonald's a installé des systèmes de commande et de paiement sur écran tactile dans de nombreux restaurants, réduisant ainsi le nombre de caissiers nécessaires. L'Université du Texas à Austin a ouvert des cafétérias entièrement automatisées. Certains cafés et restaurants utilisent des applications mobiles et tablettes pour simplifier le processus de commande, permettant aux clients de commander et de payer directement sur leur appareil. Certains restaurants ont automatisé le service des plats à table grâce à un système de tapis roulant . Des robots sont parfois utilisés pour remplacer le personnel de salle .
Construction
Exploitation minière
vidéosurveillance
L'Agence pour les projets de recherche avancée de défense ( DARPA ) a lancé, entre 1997 et 1999, le programme de surveillance et de suivi visuel automatisé (VSAM), ainsi que, de 1998 à 2002, le programme de vidéosurveillance aéroportée (AVS). Actuellement, la communauté de la vision déploie d'importants efforts pour développer un système de surveillance et de suivi entièrement automatisé . La vidéosurveillance automatisée permet de surveiller les personnes et les véhicules en temps réel dans un environnement complexe. Les systèmes de surveillance automatisés existants sont conçus en fonction de l'environnement qu'ils sont principalement destinés à observer (intérieur, extérieur ou aérien), du nombre de capteurs qu'ils peuvent gérer et de la mobilité de ces capteurs (caméra fixe ou mobile). Un système de surveillance a pour but d'enregistrer les caractéristiques et les trajectoires des objets dans une zone donnée, de générer des alertes ou d'informer les autorités compétentes en cas d'événements particuliers.
Systèmes routiers
Le secrétaire aux Transports développera un prototype d'autoroute et de véhicule automatisés, servant de base à la conception de futurs systèmes autoroutiers intelligents et entièrement automatisés. Ce développement inclura des recherches sur les facteurs humains afin de garantir le succès de l'interaction homme-machine. L'objectif de ce programme est de mettre en service, d'ici 1997, la première autoroute entièrement automatisée ou une première piste d'essai automatisée. Ce système permettra l'installation d'équipements sur les véhicules automobiles, qu'ils soient neufs ou existants.
L’automatisation complète est généralement définie comme ne nécessitant aucun contrôle ou un contrôle très limité de la part du conducteur. Elle serait réalisée grâce à une combinaison de capteurs, d’ordinateurs et de systèmes de communication embarqués et installés le long de la chaussée. En théorie, la conduite entièrement automatisée permettrait de réduire l’espacement entre les véhicules et d’augmenter les vitesses, ce qui pourrait améliorer la capacité de circulation dans les zones où la construction de nouvelles routes est physiquement impossible, politiquement inacceptable ou excessivement coûteuse. Les commandes automatisées pourraient également améliorer la sécurité routière en réduisant les risques d’erreur humaine, à l’origine d’une part importante des accidents de la route. Parmi les autres avantages potentiels, on peut citer l’amélioration de la qualité de l’air (grâce à une circulation plus fluide), la réduction de la consommation de carburant et les retombées technologiques issues de la recherche et du développement liés aux systèmes autoroutiers automatisés.
Gestion des déchets
Les camions de collecte automatisés des déchets permettent de réduire le besoin en main-d'œuvre et de diminuer le niveau de travail requis pour assurer le service.
processus métier
Maison
L'automatisation est essentielle pour de nombreuses applications scientifiques et cliniques. C'est pourquoi elle est largement utilisée dans les laboratoires. Dès 1980, des laboratoires entièrement automatisés étaient opérationnels. Cependant, son coût élevé a freiné sa généralisation. L'intégration de dispositifs à bas coût aux équipements de laboratoire standard pourrait changer la donne. Les passeurs d'échantillons automatiques sont des dispositifs couramment utilisés en automatisation de laboratoire.
Automatisation logistique
Automatisation industrielle
Automatisation industrielle et Industrie 4.0
robotique industrielle

La robotique industrielle est une branche de l'automatisation industrielle qui contribue à divers processus de fabrication. Parmi ces processus, on peut citer l'usinage, le soudage, la peinture, l'assemblage et la manutention. Les robots industriels utilisent divers systèmes mécaniques, électriques et logiciels pour atteindre une précision, une exactitude et une vitesse bien supérieures aux performances humaines. L'apparition des robots industriels a eu lieu peu après la Seconde Guerre mondiale, les États-Unis ayant constaté la nécessité d'accélérer la production de biens industriels et de consommation. Les servomoteurs, la logique numérique et l'électronique à semi-conducteurs ont permis aux ingénieurs de concevoir des systèmes plus performants et plus rapides. Au fil du temps, ces systèmes ont été améliorés et perfectionnés jusqu'à ce qu'un seul robot puisse fonctionner 24 heures sur 24 avec un minimum de maintenance, voire sans maintenance. En 1997, on comptait 700 000 robots industriels en service ; ce nombre est passé à 1,8 million en 2017 Ces dernières années, l’IA associée à la robotique est également utilisée pour créer une solution d’étiquetage automatique, grâce à des bras robotisés qui appliquent automatiquement les étiquettes et à l’IA qui apprend et détecte les produits à étiqueter.
Automates programmables
L'automatisation industrielle intègre des automates programmables industriels (API) dans les processus de fabrication. Les API utilisent un système de traitement permettant de moduler les entrées et les sorties grâce à une programmation simple. Ils exploitent une mémoire programmable stockant des instructions et des fonctions telles que la logique, le séquençage, la temporisation, le comptage, etc. Grâce à un langage logique, un API peut recevoir diverses entrées et produire diverses sorties logiques, les dispositifs d'entrée étant des capteurs et les dispositifs de sortie des moteurs, des vannes, etc. Similaires aux ordinateurs, les API sont cependant optimisés pour les tâches de contrôle et une utilisation en milieu industriel, contrairement à ces derniers qui sont optimisés pour les calculs. Leur conception permet de limiter les connaissances en programmation logique à des éléments essentiels et de résister aux vibrations, aux hautes températures, à l'humidité et au bruit. Leur principal atout réside dans leur flexibilité. Avec les mêmes contrôleurs de base, un API peut gérer différents systèmes de contrôle. Les API évitent ainsi de devoir recâbler un système pour en modifier le fonctionnement. Cette flexibilité permet de concevoir des systèmes de contrôle complexes et variés à moindre coût.
Les automates programmables industriels (API) peuvent aller de petits appareils « briques de construction » avec des dizaines d'E/S dans un boîtier intégré au processeur, à de grands appareils modulaires montés en rack avec un nombre de milliers d'E/S, et qui sont souvent mis en réseau avec d'autres systèmes API et SCADA .
Ils peuvent être conçus pour de multiples configurations d' entrées et de sorties numériques et analogiques , des plages de températures étendues, une immunité aux perturbations électriques et une résistance aux vibrations et aux chocs. Les programmes de commande du fonctionnement de la machine sont généralement stockés dans une mémoire non volatile ou avec batterie de secours .
C'est dans l'industrie automobile américaine qu'est né l'automate programmable industriel (API). Avant son apparition, les systèmes de contrôle, de séquencement et de sécurité utilisés dans la fabrication automobile étaient principalement composés de relais , de temporisateurs à cames , de séquenceurs à tambour et de régulateurs en boucle fermée dédiés. Comme leur nombre pouvait atteindre plusieurs centaines, voire des milliers, la mise à jour de ces installations lors du changement annuel de modèle était un processus long et coûteux, les électriciens devant recâbler individuellement chaque relais pour modifier ses caractéristiques de fonctionnement.
L'avènement des ordinateurs numériques, dispositifs programmables à usage général, a rapidement permis de contrôler la logique séquentielle et combinatoire des processus industriels. Cependant, ces premiers ordinateurs nécessitaient des programmeurs spécialisés et un contrôle rigoureux de l'environnement d'exploitation (température, propreté et qualité de l'alimentation électrique). Pour répondre à ces exigences, l'automate programmable industriel (API) a été développé avec plusieurs caractéristiques clés : il devait résister aux conditions d'un atelier, prendre en charge les entrées/sorties discrètes (bits) de manière facilement extensible, ne pas exiger de longues années de formation à son utilisation et permettre la surveillance de son fonctionnement. De nombreux processus industriels ayant des échelles de temps facilement gérables avec des temps de réponse de l'ordre de la milliseconde, l'électronique moderne (rapide, compacte et fiable) facilite grandement la conception d'API fiables, et la fiabilité pouvait être privilégiée au détriment des performances.
Automatisation assistée par agent
- En régulation en boucle ouverte, l'action du régulateur est indépendante de la variable de fonctionnement (ou « sortie du processus »). Un bon exemple est celui d'une chaudière de chauffage central commandée uniquement par une minuterie, de sorte que la chaleur est diffusée pendant une durée constante, quelle que soit la température du bâtiment. L'action de régulation consiste à allumer ou éteindre la chaudière. Or, la variable contrôlée devrait être la température du bâtiment, ce qui n'est pas le cas car il s'agit d'une régulation en boucle ouverte de la chaudière, qui ne permet pas une régulation en boucle fermée de la température.
- En régulation en boucle fermée, l'action du régulateur dépend de la sortie du processus. Dans l'analogie de la chaudière, cela inclurait un thermostat surveillant la température du bâtiment et renvoyant un signal pour garantir que le régulateur maintienne le bâtiment à la température de consigne. Un régulateur en boucle fermée possède donc une boucle de rétroaction qui assure que l'action du régulateur permette d'obtenir une sortie du processus identique à l'« entrée de référence » ou « consigne ». C'est pourquoi les régulateurs en boucle fermée sont également appelés régulateurs à rétroaction.
La définition d'un système de contrôle en boucle fermée selon la British Standards Institution est « un système de contrôle possédant une rétroaction de surveillance, le signal d'écart formé à la suite de cette rétroaction étant utilisé pour contrôler l'action d'un élément de contrôle final de manière à tendre vers la réduction de l'écart à zéro. »
De même ; « Un système de contrôle par rétroaction est un système qui tend à maintenir une relation prescrite d’une variable du système à une autre en comparant les fonctions de ces variables et en utilisant la différence comme moyen de contrôle. »
Commande discrète (marche/arrêt)
L'un des types de régulation les plus simples est la régulation marche/arrêt . Un exemple en est le thermostat utilisé sur les appareils électroménagers, qui ouvre ou ferme un contact électrique. (Les thermostats ont été initialement conçus comme de véritables mécanismes de régulation à rétroaction, et non comme les thermostats marche/arrêt classiques des appareils électroménagers.)
La commande séquentielle consiste à exécuter une séquence programmée d' opérations discrètes , souvent selon une logique système prenant en compte les états du système. Un système de commande d'ascenseur en est un exemple.
contrôleur PID
Un contrôleur proportionnel-intégral-dérivé (contrôleur PID) est un mécanisme de rétroaction de boucle de contrôle ( contrôleur ) largement utilisé dans les systèmes de contrôle industriels .
Dans une boucle PID, le contrôleur calcule en permanence une valeur d'erreur comme la différence entre un point de consigne souhaité et une variable de processus mesurée et applique une correction basée respectivement sur les termes proportionnel , intégral et dérivé (parfois notés P , I et D ) qui donnent leur nom au type de contrôleur.
La compréhension théorique et l'application remontent aux années 1920, et elles sont mises en œuvre dans presque tous les systèmes de contrôle analogiques ; initialement dans les contrôleurs mécaniques, puis à l'aide de l'électronique discrète et plus récemment dans les ordinateurs de processus industriels.
Contrôle séquentiel et contrôle de séquence logique ou d'état du système
Dans certaines usines, le nombre total de relais et de temporisateurs à cames peut atteindre plusieurs centaines, voire des milliers. Pour gérer de tels systèmes, il a fallu développer des techniques et des langages de programmation novateurs, dont le langage à relais , où les schémas des relais interconnectés ressemblaient aux barreaux d'une échelle. Des ordinateurs spéciaux, appelés automates programmables, ont ensuite été conçus pour remplacer ces ensembles de composants par une unité unique, plus facile à reprogrammer.
Dans un circuit de démarrage et d'arrêt moteur câblé classique (appelé circuit de commande ), le moteur démarre par simple pression sur un bouton « Démarrage » ou « Marche », qui active deux relais électriques. Le relais de maintien verrouille les contacts, assurant ainsi l'alimentation du circuit de commande lorsque le bouton-poussoir est relâché. (Le bouton de démarrage est normalement ouvert et le bouton d'arrêt normalement fermé.) Un autre relais alimente un interrupteur qui commande le dispositif actionnant le démarreur moteur (trois jeux de contacts pour une alimentation triphasée industrielle) sur le circuit d'alimentation principal. Les gros moteurs fonctionnent à haute tension et subissent un courant d'appel important, ce qui rend la rapidité d'établissement et de rupture du contact cruciale. L'utilisation d'interrupteurs manuels peut s'avérer dangereuse pour le personnel et les biens. Les contacts de maintien du circuit de démarrage et les contacts d'alimentation principaux du moteur sont maintenus enclenchés par leurs électroaimants respectifs jusqu'à ce qu'un bouton « Arrêt » ou « Stop » soit enfoncé, ce qui désactive le relais de maintien.

Il est courant d'ajouter des dispositifs de verrouillage à un circuit de commande. Supposons que le moteur de l'exemple alimente une machine nécessitant une lubrification critique. Dans ce cas, un dispositif de verrouillage pourrait être ajouté pour garantir le fonctionnement de la pompe à huile avant le démarrage du moteur. Les temporisateurs, les interrupteurs de fin de course et les cellules photoélectriques sont d'autres éléments fréquemment utilisés dans les circuits de commande.
Les électrovannes sont largement utilisées avec de l'air comprimé ou un fluide hydraulique pour actionner des actionneurs sur des composants mécaniques . Alors que les moteurs sont utilisés pour fournir un mouvement rotatif continu , les actionneurs sont généralement plus adaptés pour créer de manière intermittente une amplitude de mouvement limitée pour un composant mécanique, comme le déplacement de divers bras mécaniques, l'ouverture ou la fermeture de vannes , le levage de lourds rouleaux de presse ou l'application d'une pression sur des presses.
Contrôle informatique
Les ordinateurs peuvent assurer à la fois le contrôle séquentiel et le contrôle par rétroaction, et généralement, un seul ordinateur remplit les deux fonctions dans une application industrielle. Les automates programmables (API) sont un type de microprocesseur spécialisé qui a remplacé de nombreux composants matériels tels que les temporisateurs et les séquenceurs à tambour utilisés dans les systèmes à relais. Les ordinateurs de contrôle de processus à usage général ont progressivement remplacé les contrôleurs autonomes, un seul ordinateur étant capable d'effectuer les opérations de centaines de contrôleurs. Les ordinateurs de contrôle de processus peuvent traiter les données provenant d'un réseau d'API, d'instruments et de contrôleurs afin de mettre en œuvre un contrôle classique (tel que PID) de nombreuses variables individuelles ou, dans certains cas, d'implémenter des algorithmes de contrôle complexes utilisant de multiples entrées et des manipulations mathématiques. Ils peuvent également analyser les données et créer des affichages graphiques en temps réel pour les opérateurs, ainsi que générer des rapports pour les opérateurs, les ingénieurs et la direction.
Le contrôle d'un guichet automatique bancaire (GAB) est un exemple de processus interactif où un ordinateur répond logiquement à la sélection de l'utilisateur, en se basant sur les informations extraites d'une base de données en réseau. Le fonctionnement d'un GAB présente des similitudes avec d'autres processus de transaction en ligne. Les différentes réponses logiques sont appelées scénarios . Ces processus sont généralement conçus à l'aide de cas d'utilisation et d'organigrammes , qui guident la programmation. Le plus ancien mécanisme de contrôle par rétroaction fut l'horloge à eau, inventée par l'ingénieur grec Ctésibios (285-222 av. J.-C.).